Что входит в цикл движений при ходьбе. Ходьба человека (анатомическая характеристика)
ЧАСТНАЯ БИОМЕХАНИКА
Этот раздел посвящен биомеханическим закономерностям ходьбы, бега, плавания и других циклических локомоций, бросков, ударов и других переместительных действий, а также общеразвивающих гимнастических упражнений. Рассматриваются: кинематика (длина шага и темп, позы и фазовый состав), топография работающих мышц, динамика (источники сил и их согласование), биоэнергетика и оптимальные режимы двигательной деятельности.
ГЛАВА 7. БИОМЕХАНИКА ХОДЬБЫ И БЕГА
Ходьба оживляет и воодушевляет мои мысли.
О ставаясь в покое, я почти не могу думать.
Необходимо, чтобы мое тело находилось в движении,
тогда ум тоже начинает двигаться.
Жан-Жак Руссо
Ходить и бегать для здоровья!
Ходьба и бег относятся к самым древним способам передвижения.
За 70 лет жизни человек совершает в среднем 500 миллионов шагов и преодолевает путь, приблизительно равный расстоянию от Земли до Луны (384 тыс. км.).
Мы привыкли, что идти пешком — это значит идти медленно. Но в наш век больших скоростей и ходьба стала стремительной. Победитель Кубка мира в спортивной ходьбе в 1983 г. прошел 20 км со средней скоростью 15,9 км/ч.
Результаты в беге также не стоят на месте. Мужчины в 100-метровом спринте перешагнули десятисекундный барьер, а женщины освоили марафон.
Будучи «фундаментальными человеческими движениями», ходьба и бег интересны сами по себе. Но, кроме того, ввиду своей общедоступности они используются для изучения общих закономерностей циклических локомоций.
Рис. 69. Скорость как произведение длины и частоты шагов; пунктир — изоспида (все точки изоспиды соответствуют одной и той же скорости)
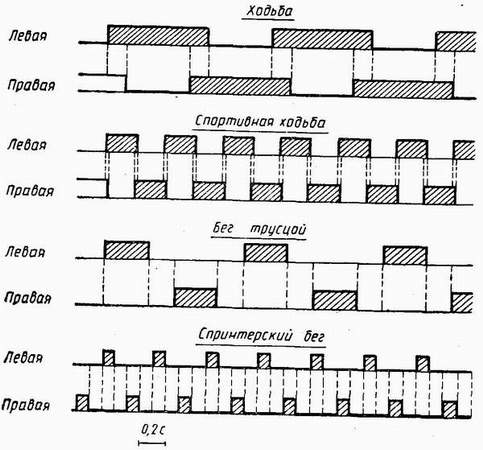
Рис. 70. Простейшие хронограммы обычной ходьбы, спортивной ходьбы, бега трусцой и спринтерского бега;
периоды опоры заштрихованы; вверху — левая нога, внизу — правая (по В. Е. Панфилову, Nigg, Denoth, M. А. Каймин, В. В. Тюпе)
КИНЕМАТИКА ХОДЬБЫ И БЕГА.
ТОПОГРАФИЯ РАБОТАЮЩИХ МЫШЦ
Как и во всех циклических локомоциях, при ходьбе и беге скорость передвижения прямо пропорциональна длине шага и темпу (рис. 69):
где v — скорость передвижения (м/с); l — длина шага (м); п — частота шагов (1/мин). Чтобы определить темп ходьбы или бега, обычно регистрируют число шагов в минуту, или частоту шагов ( Так же поступают и в конькобежном спорте. Но в плавании, гребле и велоспорте определяют темп как число циклов в минуту, а длиной шага считают расстояние, преодолеваемое за один цикл. В велоспорте это расстояние называется укладкой ) .
Одна и та же скорость может быть достигнута при разных сочетаниях длины и частоты шагов. Кривая, все точки которой соответствуют одной и той же скорости, называется изоспидой. На рис. 69 изображены две изоспиды. Видно, что увеличить скорость можно тремя способами: повысив длину шага, подняв темп и увеличив одновременно и длину, и частоту шагов.
Для того чтобы понять, как человек ходит или бегает, прежде всего нужно изучить фазовый состав этих локомоций. На рис. 70 представлены простейшие хронограммы ходьбы и бега. Из них видно, что по мере увеличения скорости передвижения:
при ходьбе сокращается период двойной опоры (когда обе ноги находятся на земле) вплоть до почти полного его исчезновения при спортивной ходьбе;
при беге увеличивается отношение длительности периода полета (когда обе ноги не касаются опоры) к длительности периода опоры.
Вопросы для самоконтроля знаний
1) Как можно отличить ходьбу от бега?
2) Почему на соревнованиях по спортивной ходьбе спортсмена снимают с дистанции, если в хронограмме его действий появляется период полета?
Сведения о скорости, темпе, длине шага, длительностях опоры, переноса ноги и полета необходимы для совершенствования тактики ходьбы и бега и дают самое общее представление о технике. Но их недостаточно, чтобы ответить на два очень важных вопроса:
1) Как организовано двигательное действие ?
2) Как им овладеть?
Для ответа на эти вопросы прежде всего нужны более подробные хронограммы.
На рис. 71 показано, что каждый полуцикл обычной ходьбы состоит из пяти фаз (римские цифры). Фазы отделены друг от друга пятью граничными позами (арабские цифры). Шагающий человек на рисунке изображен в граничных позах. Назовем эти позы и фазы между ними для одного полуцикла:
1 — отрыв стопы правой ноги от опоры;
I — подседание на левой (опорной) ноге, ее сгибание в коленном суставе;
2 — начало разгибания левой ноги;
II — выпрямление левой ноги, ее разгибание в коленном суставе;
3 — момент, когда правая нога в процессе переноса начала опережать левую;
III — вынос правой ноги с опорой на всю стопу левой ноги;
4 — отрыв пятки левой ноги от опоры;
IV — вынос правой ноги с опорой на носок левой ноги;
5 — постановка правой ноги на опору;
V — двойная опора, переход опоры с левой ноги на правую.
Во втором полуцикле фазы и граничные позы те же, только в их названиях правую ногу нужно заменить левой, а левую — правой.
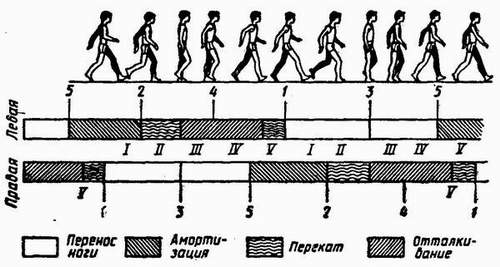
Рис. 71. Фазы ходьбы, граничные позы и элементарные действия
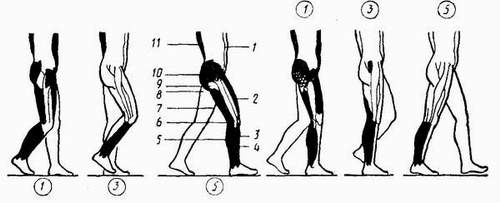
Рис. 72. Мышцы туловища и ног, на которые приходится основная нагрузка при ходьбе (по В. С. Гурфинкелю):
1 — прямая м. живота; 2 — четырехглавая м. бедра; 3 — передняя большеберцовая м.; 4 -длинная малоберцовая м.; 5 — трехглавая м. голени; 6 — полусухожильная м.; 7 — двуглавая м. бедра; 8 — большая ягодичная м.; 9 — напрягатель широкой фасции; 10 — средняя ягодичная м.; 11 — м., выпрямляющая позвоночник; цифры в кружках — номера граничных поз в соответствии с рис. 71
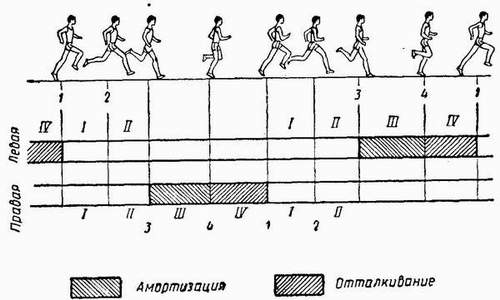
Рис. 73. Фазы и граничные позы бега
(по Д. Д. Донскому, переработано)
Когда говорят о фазовом составе двигательного действия, имеют в виду движения всего тела (в данном случае обеих ног). Но для понимания механизмов ходьбы нужно знать, какие элементарные действия выполняются каждой ногой. По времени они не всегда совпадают с фазами ходьбы (см. рис. 71). В периоде опоры выполняются: амортизация, перекат с пятки на всю ступню, отталкивание и перекат со всей ступни на носок. В периоде переноса нога сначала сгибается, а затем разгибается в коленном суставе. Из элементарных действий формируются фазы.
Топография мышц, работающих при ходьбе, показана на рис. 72.
Фазовый состав бега показан на рис. 73. Каждая половина цикла состоит из четырех фаз (римские цифры), отделенных друг от друга граничными позами (арабские цифры). В том числе:
1 — отрыв левой стопы от опоры;
I — разведение стоп;
2 — начало выноса левой ноги вперед;
II — сведение стоп с выносом левой ноги вперед;
3 — постановка правой стопы на опору;
III — амортизация, или подседание со сгибанием правой (опорной) ноги;
4 — начало разгибания правой ноги;
IV — отталкивание с выпрямлением правой ноги до отрыва от опоры.
Вторая половина цикла симметрична первой. В названиях фаз и граничных поз правая нога заменяется левой и наоборот.
Топография работающих мышц у бегуна ясна из рис. 41. Из сравнения рис. 41 и 72 видно, что нагрузка при беге ложится в основном на те же мышцы, что и при ходьбе. Однако неодинакова межмышечная координация (последовательность включения и выключения мышц). И кроме того, степень напряжения мышц при беге существенно больше.
ДИНАМИКА ХОДЬБЫ И БЕГА
Человек является самодвижущейся системой, поскольку первопричиной его движений служат внутренние силы, создаваемые мышцами и приложенные к подвижным звеньям тела. К внутренним относятся и силы инерции, приложенные к центрам масс разгоняемых и тормозимых звеньев тела («фиктивные» силы инерции) или к другим звеньям тела либо к внешним предметам («реальные» силы инерции) (рис. 74).
Сила инерции (F ин) равна произведению массы всего тела или отдельного звена на его ускорение и направлена в сторону, противоположную ускорению. Поэтому сила инерции замедляет и разгон, и торможение.
Наряду с внутренними на человека действуют внешние силы. При ходьбе и беге к ним относятся: сила тяжести, сила реакции опоры, сила сопротивления воздуха (см. рис. 74).
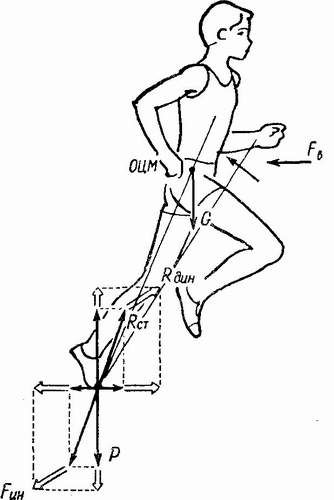
Рис . 74. Силы, действующие на человека во время ходьбы и бега: G — сила тяжести, F ин — сила инерции, Р — вес тела, R ст иR дин — статический идинамический компоненты реакции опоры, F B — сила сопротивления воздуха; обратите внимание: 1) F — сила действия ноги на опору (как и сила реакции опоры) содержит двесоставляющие: вертикальную и горизонтальную; 2) если линия действия опорной реакции не проходит через общий центр масс тела, то возникает опрокидывающий момент (показано круговой стрелкой)
Сила тяжести (гравитационная сила) приложена к центру масс и равна произведению массы тела на ускорение земного тяготения:
![]()
Например, при массе тела 50 кг сила тяжести близка к 500 Н.
Сила лобового сопротивления воздуха приложена к центру поверхности тела. Она увеличивается пропорционально квадрату скорости. Например, при скорости 9 м/с сила лобового сопротивления воздуха в 4 раза больше, чем при скорости 4,5 м/с, и в 9 раз больше, чем при скорости 3 м/с. Расчеты показывают, что при скорости бега 8 м/с ее величина достигает 20 Н.
Сила реакции опоры не является движущей силой. Но ее измеряют и изображают графически (см. рис. 74), для того чтобы определить результат совместного действия всех сил (и внутренних, и внешних). Как же формируется опорная реакция?
Отталкиваясь от опоры, человек воздействует на нее с силой отталкивания, которая состоит из двух компонентов: статического — веса (постоянного и равного силе тяжести) и динамического компонента. Динамический компонент может иметь место только при движениях, выполняемых с ускорением, когда все тело или отдельные звенья разгоняются или тормозятся. Наиболее отчетливо это видно на динамограммах подтягивания, приседания и т. п. (см. в главе 12).
Объясните, почему у вертикально стоящего человека вес равен силе тяжести, а у человека в позе, изображенной на рис. 74, вертикальная составляющая веса меньше силы тяжести и, кроме того, появляется горизонтальная составляющая веса.
Динамограммы ходьбы и бега имеют более сложную форму (рис. 75), чем, например, динамограмма приседания. Это объясняется тем, что динамический компонент силы действия ноги на опору зависит от разнонаправленных сил инерции многих сегментов тела. Каждая из них приложена к центру масс ускоряемого или тормозимого сегмента, но передается через опорную ногу на опору. Эти силы инерции возникают при движениях, сопровождающих ходьбу и бег, в том числе:
1) при маховых движениях; например, при отталкивании правой ногой маховое движение левой ноги увеличивает силу действия правой ноги на опору. Впечатляют следующие цифры: при спринтерском беге вклад маховых движений обеих рук в опорную реакцию достигает 20%, а вклад маховой ноги к середине периода опоры — 50%;
2) при сгибании или разгибании опорной ноги; например, в начале фазы амортизации сгибание опорной ноги бегуна приводит к возникновению силы инерции, уменьшающей силу действия на опору.
В конечном итоге силы действия ног на опору отображают всю совокупность внутренних и внешних сил, действующих на тело человека. То же можно сказать и о силе реакции опоры, которая равна по величине силе действия на опору, но противоположно направлена. Как видно из рис. 74, сила действия на опору (а также и реакция опоры) имеет две составляющие: вертикальную и горизонтальную. Их величины изменяются во времени, о чем судят по динамограмме ходьбы или бега (рис. 75).
Горизонтальная составляющая динамограммы бега и ходьбы состоит из двух полуволн: отрицательной и положительной. Отрицательная полуволна соответствует начальной фазе периода опоры, когда происходит неизбежное торможение. Ее следует по возможности уменьшать, для чего непосредственно перед постановкой ноги на опору надо делать активное «загребающее» движение.
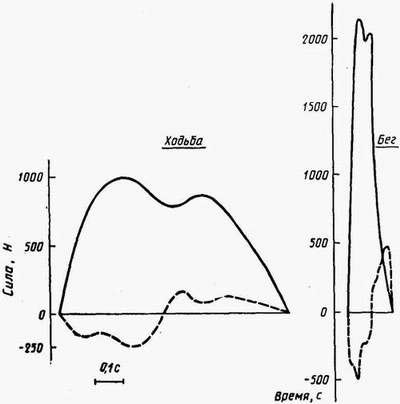
Рис. 75. Вертикальная (сплошная линия) и горизонтальная (пунктир) составляющие силы действия на опору в обычной ходьбе и спринтерском беге
(по М. А. Каймин, В. В. Тюпе)
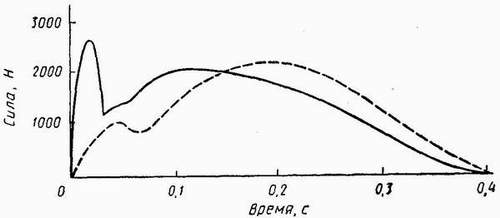
Рис. 76. Динамограмма бега трусцой по жесткому (сплошная линия) и мягкому (пунктир) покрытию
(по Nigg, Denoth)
В результате раньше начинается вторая, положительная полуволна динамограммы, показывающая, как изменяется во времени сила, продвигающая тело бегуна или ходока вперед. Ее величина у высококвалифицированных бегунов достигает 500-600 Н.
Значительно больше амплитуда вертикальной составляющей динамограммы. При беге она достигает у мастеров спорта 2800 Н, а у новичков 1300 Н. При ходьбе амплитуда вертикальной составляющей всреднем достигает 1000 Н.
На величину силы действия на опору влияют свойства дорожки и материал, из которого изготовлена обувь. Разница в величине вертикальной составляющей опорной реакции при ходьбе в обуви с жесткой кожаной подошвой и подошвой из микропористой резины достигает 350 Н.
Мягкое покрытие дорожки и обувь с амортизаторами делают технику ходьбы и бега более соответствующей критерию комфортабельности (рис. 76). Тем самым уменьшается давление на суставы и межпозвоночные диски. Эти перегрузки вреднее, чем принято думать. И не случайно те, кто бегает трусцой по асфальту и в жесткой обуви, часто жалуются на боли в пояснице и суставах.
ЭНЕРГЕТИКА ХОДЬБЫ И БЕГА
При ходьбе и беге механическая энергия определяется скоростями движения тела и его звеньев и их расположением, т. е. кинетической и потенциальной энергией. При ходьбе и беге человек затрачивает энергию не только на горизонтальные, но и на вертикальные и поперечные перемещения общего центра масс.
В зависимости от фазы цикла величина кинетической и потенциальной энергии тела изменяется. Характер этих изменений в ходьбе и беге принципиально различен. Кинетическая и потенциальная энергия в ходьбе изменяется в противофазе; например, в момент постановки ноги на опору максимум кинетической энергии совпадает с минимумом потенциальной, а в беге — синфазно (например, в высшей точке полета максимум кинетической энергии совпадает с максимумом потенциальной). Следовательно, при ходьбе происходит рекуперация энергии, т. е. ее сохранение путем перехода кинетической энергии в потенциальную энергию гравитации и обратно, а при беге этот вид рекуперации практически отсутствует. Зато при беге значительно более выражен другой вид рекуперации, когда кинетическая энергия переходит в потенциальную энергию сокращающихся мышц, действующих подобно пружине.
Энергозатраты на 1 м пути при ходьбе меньше, чем при беге, но только при низких скоростях передвижения. При высоких скоростях бег, наоборот, экономичнее ходьбы (см. рис. 53). Зона, где более выгоден бег, отделена от зоны, где более выгодна ходьба, граничной скоростью. Граничная скорость определяется числом Фруда (Ф), которое вычисляется по формуле
где g — ускорение земного тяготения (м/с 2); v -скорость передвижения человека (м/с); L o -высота общего центра масс тела в основной стойке (м).
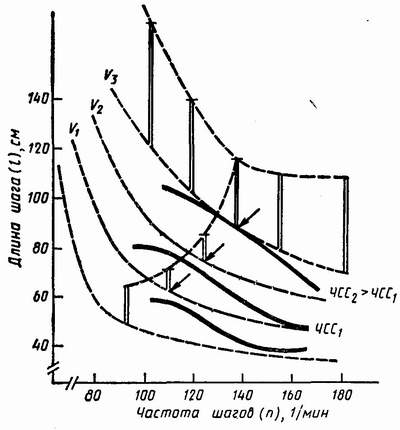
Рис. 77. Энергетическая стоимость метра пути при различных сочетаниях длины и частоты шагов: пунктир — изоспиды; сплошные линии- линии одинаковых величин частоты пульса; стрелками указаны оптимальные по экономичности сочетания длины и частоты шагов
Если число Фруда меньше единицы (Ф<1), то выгоднее ходьба, а при Ф>1 выгоднее бег. Граничная скорость соответствует условию Ф=1 и, следовательно, может быть рассчитана по формуле
Энергетические затраты зависят от многих факторов, в том числе от сочетания длины и частоты шагов. При слишком коротких или чересчур длинных шагах (что соответствует недостаточной или чрезмерной силе отталкивания) энергозатраты на 1 м пути выше, чем при оптимальном сочетании длины и частоты шагов (рис. 77). Например, отклонение длины шага от оптимальной величины на 6% при беге со скоростью 4 м/с увеличивает энергетические затраты, приходящиеся на метр пути в среднем на 1 Дж.
Какой вид передвижения (бег или ходьба) более экономичен и почему?
ОПТИМИЗАЦИЯ ХОДЬБЫ И БЕГА
Для оптимизации ходьбы и бега прежде всего необходимо минимизировать непроизводительные энергозатраты.
Это важно и в том случае, когда критерием оптимальности служит экономичность и когда основной целью является повышение соревновательного результата.
Вопрос для самоконтроля знаний
Какой критерий оптимальности является основным, когда спортсмен стремится максимизировать среднедистанционную скорость?
В процессе оптимизации ходьбы и бега решаются следующие задачи:
1) Выбор оптимальной скорости, длины шага и темпа. Наиболее экономичные величины скорости, длины шага
и темпа изменяются с возрастом (рис. 78). Из рисунка видно, что у детей и пожилых людей уровни оптимальных показателей ниже (за исключением темпа у детей), чем у здоровых людей в возрасте расцвета двигательных возможностей. На их величину оказывает влияние ряд факторов: состояние здоровья, спортивная квалификация, степень тренированности, утомление, качество обуви и т. д.
2) Снижение вертикальных и поперечных колебаний о. ц. м.
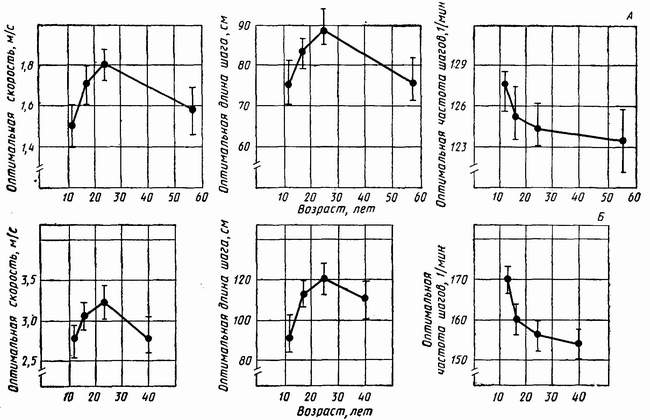
Рис. 78. Возрастные изменения оптимальной по экономичности скорости и оптимального сочетания длины и ча стоты шагов при ходьбе (А) и беге (Б); вертикальными отрезками показаны доверительные интервалы, в пределы которых попадает 95% всех случаев
В ходьбе и беге полезной работой является только горизонтальная внешняя работа . Вертикальные и поперечные перемещения тела относятся к непроизводительным движениям. Однако ошибочно думать, что, устранив вертикальные перемещения тела совсем, можно сделать ходьбу и бег более экономичными. Наоборот, при полном отсутствии вертикальных колебаний их энергетическая стоимость возрастает, так как движения становятся скованными и теряется та часть энергии, которая при естественной технике движений рекуперируется. Существует оптимальная величина размаха вертикальных колебаний о. ц. м., при которой энергозатраты при ходьбе и беге минимальны.
Для устранения непроизводительных перемещений тела целесообразно использовать повороты таза (рис. 79). Благодаря поворотам таза не только уменьшаются вертикальные и боковые колебания тела, но также удлиняется шаг и ускоряется постановка стопы на опору.
Задание для самоконтроля знаний
Пройдите по комнате своей обычной походкой. А затем измените походку следующим образом: активно выполняйте подгребающее и отталкивающее движения опорной ногой и в то же время поворачивайте таз так, как показано на рис. 79. Вы заметите, что стук каблука об опору стал значительно меньше — походка сделалась мягче.
Почему так получилось? Как это отразилось на скорости и экономичности ходьбы?
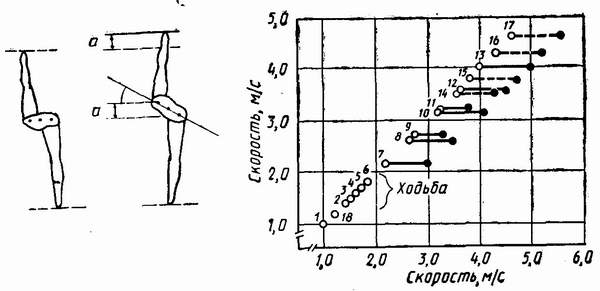
Наряду с оптимальной скоростью, о которой уже рассказывалось, имеет важное значение зона экономичных режимов передвижения (рис. 80). Зоной экономических режимов называется диапазон скоростей от оптимальной (наиболее экономичной) до пороговой, соответствующей уровню анаэробного порога (Анаэробный порог — это интенсивность физической нагрузки, начиная с которой из-за значительного усиления анаэробного метаболизма происходит накопление лактата в крови. Подробное объяснение этого феномена в курсе биохимии ). Уменьшение скорости бега и ходьбы по сравнению с оптимальной нерационально, так как приводит к возрастанию энергетической стоимости метра пути. Бег со скоростью выше пороговой вызывает накопление в организме молочной кислоты и других продуктов метаболизма, а это приводит к сильному утомлению.
Передвижение с наиболее экономичной скоростью используется в качестве поддерживающей физической нагрузки, для больных и ослабленных такая нагрузка является развивающей. Пороговая интенсивность бега в спорте считается оптимальной при формировании основ выносливости.
|
Рис. 79. Движения таза при ходьбе: |
Рис. 80. Границы зоны экономических режимов при ходьбе, беге и передвижении на лыжах (пунктир): о — оптимальная (наиболее экономичная) скорость; ■ — анаэробный порог: 1 — мальчики 5-7 лет; 2 — мальчики 11 — 12 лет; 3 — мужчины 55-65 лет; 4 — юноши 15- 17 лет; 5 — женщины 20-22 лет; 6 — мужчины 20-25 лет; 7 — мальчики 5-7 лет; 8 — женщины 20-22 лет; 9 — мальчики 11 — 12 лет; 10 — нетренированные мужчины 20- 22 лет; 11 -тренированные девушки 15- 16 лет; 12 — тренированные юноши 15- 16 лет; 13 — тренированные мужчины 21-24 лет; 14 — тренированные девушки 15-17 лет; 15 — тренированные юноши 15-17 лет; 16 — тренированные мужчины 18-26 лет; 17 — высокотренированные мужчины 19-24 лет; 18 — мужчины 45-60 лет после инфаркта миокарда |
Ходьба — это автоматизированная локомоция, направленная на выполнение конкретной двигательной задачи. Локомоторный акт представляет собой целесообразное действие, которое управляется центральной иннервационной программой. В основе ходьбы лежит деятельность спинального генератора шагательных движений в виде системы интернейронов и мотонейронов, а также мышц-антагонистов с взаимными тормозными связями. Ходьба является координированным процессом. Согласованные движения отдельных частей тела синергичны и требуют минимального управления, что облегчает движения. Для осуществления ходьбы отсутствует необходимость в постоянном контроле ЦНС за положением конечности и за степенью мышечной активности. Ходьба является автоматизированным процессом, что позволяет расходовать энергию на оптимальном уровне. Нарушение автоматизма вызывает увеличение энергозатрат и требует дополнительных усилий со стороны ОДС и ЦНС.
Во время ходьбы под действием силы тяжести и реакции опоры происходит последовательное чередование подъемов и падений тела над поверхностью опоры, когда все тело и отдельные его сегменты совершают маятникообразные движения. Все тело целиком представляет собой обратный маятник, точкой опоры которого служит стопа. Общий центр масс (ОЦМ) тела у взрослого расположен выше опоры на уровне второго поясничного позвонка L2. Тело, подобно маятнику, производит колебательные движения над точкой опоры. При ходьбе движения маятника осуществляются за счет отталкивания от опоры. Опорная нога, туловище и голова образуют обратный маятник, а переносимая нога работает как прямой маятник. При ходьбе после отталкивания от опоры маятник выходит из состояния неустойчивого равновесия и начинает падать вперед. Он совершает наклон в голеностопном суставе над стопой, которая фиксирована на опоре. По мере увеличения угла наклона тела под действием ускорения свободного падения происходит увеличение его кинетической энергии. Падение маятника прекращается в результате изменения положения ног. Во время движения тела вперед одна из ног остается фиксированной на опоре, а другая сгибается в тазобедренном суставе и выносится вперед по типу прямого маятника. Вынос бедра облегчен за счет наклона вперед всего тела. Во время выноса бедра происходит разгибание голени в коленном суставе и ее вынос также по типу прямого маятника. Вынесенная нога совершает процесс переноса по воздуху и упирается на опору впереди тела, в результате чего происходит прекращение падения маятника и восстановление вертикального положения тела. Опорная нога, которая осталась позади тела, совершает отталкивание от опоры и перенос по воздуху как прямой маятник.
Маятникообразные движения тела вызывают изменение положения ОЦМ. Наклон тела вперед приводит к понижению ОЦМ, а отталкивание от опоры вызывает его подъем. За время двойного шага опускание и подъем.ОЦМ происходит дважды. Самое высокое положение ОЦМ достигает в реакция опоры фазу двойной опоры, когда одна нога опирается на пятку, а другая нога — на носок. Маятниковый механизм дает существенную энергетическую выгоду за счет повторяемости и устойчивости движений. Повторяемость движений уменьшает затраты энергии при локомоции. Маятниковый механизм является энергосберегающим видом передвижения, что влияет на все параметры ходьбы. Устойчивость движений обеспечивает постоянство воспроизведения циклов движения и снижает необходимость в их активном управлении. Низкие затраты энергии и легкость управления являются факторами оптимизации локомоции.
Для всей ОДС, и для нижней конечности в частности, характерны колебания, которые обладают собственной частотой. При ходьбе в конечностях возникают вынужденные колебания. Система управления движением использует колебательные свойства нижних конечностей и связанное с колебаниями явление резонанса. Существует определенная частота вынуждающей силы, при которой колебания ОДС оказываются восприимчивыми к действию этой силы. Для того чтобы собственная частота конечности совпала с частотой вынужденных колебаний, система управления движением изменяет моменты инерции в суставах ноги. Резонанс позволяет осуществлять концентрацию мышечного усилия для выполнения ходьбы, а также минимизировать затраты энергии на ходьбу. Изменение скорости движения вызывает изменение частоты колебаний конечности, которая подстраивается под частоту сокращающихся мышц путем изменения углов движения в суставах ноги. Координация сгибания и разгибания в тазобедренном, коленном и голеностопном суставах приводит к уменьшению энергозатрат. Оптимум мышечного резонанса и передачи энергии наблюдается при скорости ходьбы 1,4 м/с.
У ходьбы имеются кинематические параметры: длина шага, ритм, скорость, продолжительность периода опоры, углы ротации и наклона таза, подгибания в коленном суставе, а также соотношение углов движения во всех суставах и т. д. Период, на протяжении которого одна из ног отталкивается от опоры, переносится по воздуху и приземляется на опору, пока другая нога находится на опоре, называется двойным шагом. У взрослого при ходьбе в произвольном темпе ритм ходьбы колеблется в пределах 92-98 шагов в минуту, средняя скорость ходьбы составляет 1,1-1,2 м/с. Длина двойного шага составляет 1,4 м. При скорости движения 1,04 м/с длина двойного шага составляет 76% роста тела. Ходьба состоит из чередующихся между собой периодов опоры и переноса по воздуху. По отношению к времени двойного шага период переноса составляет 36%, период опоры — 64%. В состав периода опоры входят: фаза опоры на пятку — 7%, фаза опоры на всю стопу, или одноопорная фаза,- — 38%, фаза опоры на носок — 18%. Двухопорная фаза, когда имеется опора на пятку одной ноги и носок другой ноги, составляет 13%. Пропорциональное соотношение всех параметров во время ходьбы обеспечивает сохранение энергии при ее переходе из потенциальной в кинетическую путем поглощения ударных нагрузок, а так5ке при минимизации смещения ОЦМ и плавности ускорения движений.
Основной динамической характеристикой ходьбы является реакция опоры. Это сила, с которой во время ходьбы нога приземляется на опору и отталкивается от нее. Реакция опоры состоит ij3 вертикального, продольного и поперечного компонентов, действующих в соответствующих направлениях. В составе реакции опоры выделяют передний толчок и задний толчок. Передний толчок происходит, в фазу опоры на пятку. Задний толчок происходит в фазу опоры на носок. В фазу опоры на всю стопу происходит вначале уменьшение переднего толчка, а затем нарастание заднего толчка. Величина толчков превосходит вес тела. Во время ходьбы реакция опоры начинается с фазы переднего толчка, когда стопа касается пяткой опорной поверхности. Возникает несколько моментов сил, которые обусловлены точкой приложения реакции опоры. В сагиттальной плоскости область контакта пятки с опорой расположена в проксимальной части пяточной области. Вектор реакции опоры проходит позади осей коленного и голеностопного суставов, что способствует сгибанию в коленном суставе. Стопа находится под действием двух моментов. Наружный сгибательный момент вызван действием веса переднего отдела стопы. Он преобладает над внутренним моментом, который обусловлен эксцентрическим сокращением передней большеберцовой мышцы с целью торможения подошвенного сгибания. По мере установки стопы на опоре происходит сгибание пяточной кости. Она тянет за собой вниз таранную кость, которая ротируется вовнутрь и увлекает за собой большеберцовую кость. Начинается внутренняя ротация голени. Во фронтальной плоскости точка контакта пятки с опорой расположена латеральнее оси голени и подтаранного сустава, что вызывает наружный эверсионный момент в подтаранном суставе. Происходит эверсия пятки, которая занимает от 8% до 15% периода опоры. При эверсии пяточной кости оси таранно-ладьевидного и пяточно-кубовидного суставов располагаются параллельно, что способствует низкой жесткости средне-плюсневого сустава, амортизации переднего толчка, уменьшению ударной и торсионной силы, которая действует на голеностопный сустав и голень. В фазу переднего толчка увеличивается активность малоберцовой мышцы. Она пронирует стопу, обеспечивает прилегание к опоре медиального края стопы, что повышает устойчивость тела. Малоберцовая мышца преодолевает тягу задней большеберцовой мышцы, которая работает в эксцентрическом режиме и удерживает стопу от резкого опускания. Фаза переднего толчка занимает 7% от времени двойного шага. Во время переднего толчка идет сгибание коленного сустава, амплитуда которого достигает 10°. Благодаря движениям в средне-плюсневом, подтаранном и коленном суставах происходит амортизация реакции опоры, и она не передается на туловище.
Наступает фаза опоры на всю стопу, во.время которой происходит прислоение к опоре всей подошвенной поверхности стопы. В фазу опоры на всю стопу большеберцовая кость совершает движение в двух плоскостях. В горизонтальной плоскости большеберцовая кость продолжает ротацию вовнутрь. В сагиттальной плоскости большеберцовая кость, как часть обратного маятника, совершает ротацию на блоке таранной кости в направлении сзади наперед. Происходит разгибание голени в голеностопном суставе. Наружный разгибательный момент, который обусловлен действием веса тела, перенесенным на ногу, преобладает над внутренним сгибательным моментом, обусловленным эксцентрическим сокращением трехглавой мышцы, препятствующей разгибанию в голеностопном суставе. В фазу опоры на всю стопу реакция опоры претерпевает уменьшение. Под действием наружного момента происходит опускание свода стопы до минимума за весь период опоры. Наружный момент преобладает над внутренним, который обусловлен действием задней большеберцовой мышцы, препятствующей опусканию свода. Эксцентрическая активность задней большеберцовой мышцы нарастает по мере увеличения нагрузки на стопу. За счет работы малоберцовой мышцы происходит пронация и отведение стопы в переднем отделе. Момент отведения, создаваемый малоберцовой мышцей, преобладает над моментом приведения, создаваемым задней большеберцовой мышцей. Отведение переднего отдела стопы способствует понижению ее свода. Продолжительность фазы опоры на всю стопу составляет 38% времени двойного шага. Фаза стояния на всей стопе переходит в фазу заднего толчка, когда угол наклона голени вперед колеблется в пределах от 8° до 25°, в среднем составляя 15-20°. В фазу заднего толчка движению тела сообщается пропульсия. Задний толчок начинается с отрыва пятки от опоры. Перед отрывом пятки происходит окончание пронации стопы и начало супинации. После отрыва пятки равнодействующая реакции опоры проходит впереди от коленного сустава, что создает разгибательный момент, который способствует разгибанию колена и уменьшению нагрузки на мышцы-разгибатели голени. В голеностопном суставе на смену разгибания приходит сгибание. Внутренний сгибательный момент в голеностопном суставе, вызванный концентрическим сокращением задней группы мышц голени, преобладает над наружным моментом, вызванным действием веса тела. Благодаря содружественному сокращению трехглавой, малоберцовой и задней большеберцовой мышц происходит резкое нарастание реакции опоры. Трехглавая мышца производит сгибание стопы, в результате чего осуществляется отталкивание от опоры. Высокая активность трехглавой мышцы сохраняется на протяжении всего заднего толчка. Напряжение малоберцовой мышцы способствует стабилизации 1-го плюснефалангового сустава и пяточно-кубовидного сустава. Задняя большеберцовая мышца осуществляет инверсию стопы, наружную ротацию большеберцовой кости и приведение переднего отдела стопы. При инверсии оси таранно-ладьевидного и пяточно-кубовидного суставов они утрачивают свое параллельное положение и устанавливаются под углом друг к другу вплоть до прямого, что увеличивает жесткость средне-тарзального сочленения. Приведение стопы в средне-тарзальном суставе сопровождается увеличением ее свода. Момент ротации большеберцовой кости наружу, обусловленный тягой задней большеберцовой мышцы, преобладает над моментом внутренней ротации, обусловленным тягой малоберцовой мышцы. В фазу заднего толчка задняя большеберцовая мышца и малоберцовая мышца действуют одновременно, что приводит к увеличению жесткости переднего отдела стопы. Происходит улучшение рычажных свойств переднего отдела стопы во время отталкивания от опоры, что облегчает работу трехглавой мышцы. Передняя группа мышц остается неактивной.
После отрыва пятки от опоры начинается разгибание в плюснефаланговых суставах, амплитуда которой при ходьбе босиком достигает 60°. Движение в плюснефаланговых суставах оказывает влияние на качество переката стопы. Последовательный процесс нереката — вначале через головки плюсневых костей, затем через пальцы — приводит к постепенному увеличению рычага отталкивания на 1/3, что обеспечивает плавность ускорения движения тела. При отталкивании 9т опоры задний отдел стопы оказывается под действием двух разнонаправленных сил. Во-первых, это натяжение ахиллова сухожилия, которое осуществляет тракцию пяточной кости кверху. Во-вторых, это натяжение подошвенного-апоневроза. При разгибании пальцев на угол более 30й возникает результирующая сила, прижимающая пяточную кость к костям среднего отдела стопы и стабилизирующая задний отдел стопы. Разгибание в плюснефаланговых суставах сменяется их сгибанием. Под действием мышц-сгибателей пальцев и большого пальца происходит отталкивание пальцами от опоры. Во время опоры непальцы вектор реакции опоры смещается кзади от коленного сустава, что вызывает в нем образование сгибательного момента. Сгибание колена облегчает-перенос ноги по воздуху в последующий период ходьбы.
Участие в опоре отдельных пальцев зависит от вьыбора одной из осей, которые используются при перекате через передний отдел стопы. На уровне плюснефалангрвых суставов 2-я плюсневая кость является наиболее выступающей в дистальном направление, что приводит к образованию двух осей переката, в результате чего в переднем отделе образуется поперечная ось через головки 1-й и 2-й плюсневых костей и косая ось через головки 2-й и 5-й плюсневых костей. Плечо рычага при перекате через поперечную ось на 1/5 больше, чем при перекате через косую ось. Относительно большая длина рычага компенсируется участием в отталкивании большого пальца, сила которого превышает силу остальных: пальцев в 2 раза. Наличие двух осей переката позволяет разнообразить процесс ходьбы, осуществить отталкивание в соответствии с колебаниями туловища и обеспечить эффективность передвижения по неровной поверхности. Перекат стопы оканчивается после отрыва пальцев от опоры. Продолжительность фазы опоры на носок составляет 18% времени двойного шага.
После периода опоры наступает период переноса ноги по воздуху, который облегчен благодаря сгибанию голени в коленном суставе. В начале периода переноса стопа остается согнутой в голеностопном суставе, после чего наступает ее разгибание под действием концентрического сокращения передней большеберцовой мышцы. Разгибание продолжается до следующего контакта стопы с опорой и достигает максимума перед передним толчком. Разгибание стопы облегчает перенос ноги над поверхностью опоры. При разгибании стопы возникает ее эверсия в подтаранном суставе. Продолжительность периода переноса ноги по воздуху составляет 34% от времени двойного шага.
Для нормальной ходьбы необходимо равновесие всех мышечных сил. Недостаточность каждой из мышц приводит к мышечному дисбалансу и вызывает нарушение ходьбы. При недостаточности задней большеберцовой мышцы наступает преобладание мышц-эверторов, действие которых проявляется в зависимости от фаз переката. В фазе переднего толчка и фазе опоры на всю стопу преобладающая тяга малоберцовых мышц приводит к быстрому наступлению эверсии, которая сопровождается отведением в среднетарзальном суставе. В фазу заднего толчка преобладающая тяга малоберцовых мышц лишает свод стопы необходимой жесткости. Во время отталкивания от опоры происходит эверсия пятки, отведение переднего отдела стопы, уплощение ее свода и растяжение прыжковой связки. При недостаточности малоберцовой мышцы доминирует тяга задней большеберцовой мышцы. Во время ходьбы наступает уменьшение эверсии и преобладание инверсии, что приводит к растяжению латеральных связок голеностопного сустава. При недостаточности малоберцовой мышцы в фазе заднего толчка отсутствует стабилизация 1-й плюсневой кости, что ведет к снижению опороспособности медиального края стопы. При недостаточности трехглавой мышцы происходит ослабление отталкивания от опоры, что не поддается компенсации со стороны других мышечных групп голени и частично восполняется работой четырехглавой мышцы бедра. Во время отталкивания от опоры имеет место недостаточная стабилизация заднего отдела стопы и неполное ограничение наружной ротации голени на фиксированной стопе, что частично компенсируется напряжением задней большеберцовой и малоберцовой мышц.
Ходьба — автоматизированный двигательный акт, осуществляющийся в результате сложной координированной деятельности скелетных мышц туловища и конечностей.
Отталкиваясь от почвы, нога приводит тело в движение — вперед и несколько вверх и вновь совершает размах в воздухе.
При ходьбе тело поочередно опирается то на правую, то на левую ногу.
Акт ходьбы отличается чрезвычайно точной повторяемостью отдельных его компонентов, так что каждый из них представляет точную копию в предыдущем шаге.
В акте ходьбы деятельное участие принимают также верхние конечности человека: при выносе вперед правой ноги правая рука движется назад, а левая — выносится вперед. Руки и ноги человека при ходьбе совершают движения в противоположных направлениях.
Движение отдельных звеньев свободной ноги (бедра, голени и стопы) определяется не только сокращением мышц, но и инерцией. Чем ближе звено к туловищу, тем меньше его инерция и тем раньше оно может последовать за туловищем. Так, бедро свободной ноги перемещается вперед раньше всего, поскольку оно ближе всего к тазу. Голень, будучи дальше от таза, отстает, что ведет к сгибанию ноги в колене. Точно так же отставание стопы от голени вызывает сгибание в голеностопном суставе.
Последовательное вовлечение мышц в работу и точная координация их сокращений при ходьбе обеспечиваются у человека ЦНС и главным образом корой больших полушарий головного мозга. С точки зрения нервного механизма, ходьба представляет собой автоматизированный цепной рефлекс, в котором афферентная импульсация, сопровождающая каждый предыдущий элемент движения, служит сигналом для начала следующего.
Функциональный анализ ходьбы . Ходьба — это сложное циклическое локомоторное действие, одним из основных элементов которого является шаг.
При ходьбе, как и при других видах локомоторного движения, перемещение тела в пространстве происходит благодаря взаимодействию внутренних (сокращение мышц) и внешних (масса тела, сопротивление опорной поверхности и др.) сил. В каждом шаге, совершаемом правой и левой ногой, различают период опоры и период маха. Наиболее характерной особенностью всех видов ходьбы по сравнению с бегом и прыжками является постоянное опорное положение одной ноги (период одиночной опоры) или двух ног (период двойной опоры). Соотношение этих периодов обычно равно 4:1. Как период опоры, так и период маха может быть разделен на две основные фазы, а именно: период опоры — на фазы переднего толчка и заднего толчка , разделенные моментомвертикали ; маха — фазы заднего шага и переднего шага , между которыми также находится момент вертикали .
Фаза переднего толчка. После заключительной фазы переднего шага начинается постановка стопы на почву при почти выпрямленном, но не закрепленном коленном суставе и согнутом, слегка отведенном и супинированном бедре. Стопа становится на опорную поверхность пяткой, после чего она совершает двойной перекат: с пятки на носок и снаружи внутрь. Этот перекат происходит под влиянием силы тяжести тела и последовательного включения в работу короткой малоберцовой мышцы, поднимающей наружу край стопы и далее мышц — длинной малоберцовой, задней большеберцовой, длинного сгибателя большого пальца стопы и длинного сгибателя пальцев, поддерживающих продольную дугу (свод) стопы. Такое движение стопы имеет двоякое значение: увеличение длины шага и растягивание мышц заднего отдела голени, участвующих в отталкивании тела. В начальном периоде опоры приобретает большое значение рессорная функция, выполняемая суставами стопы и незакрепленным суставом колена. Далее под действием тяжести и инерции тела нога несколько сгибается в коленном суставе и разгибается в голеностопном суставе при уступающей работе четырехглавой мышцы и мышц заднего отдела голени, что еще более повышает буферные свойства конечности.
Момент вертикали. К моменту вертикали нога выпрямляется и приводится за счет сокращения большей части мышц бедра и отчасти под влиянием силы тяжести. В это время стопа опирается на грунт всей подошвой, причем большинство ее мышц своим сокращением способствует сохранению сводов и участвует в функции удержания равновесия тела.
Фаза заднего толчка тела (отталкивание от опорной поверхности). В связи с этим контактирующая с грунтом конечность удлиняется за счет разгибания во всех ее суставах. В тазобедренном суставе вновь происходит некоторое отведение, но в отличие от переднего толчка, сопровождаемое небольшим поворотом бедра (внутрь). Ведущая роль в этой фазе принадлежит четырехглавой, полусухожильной, полуперепончатой, длинной головке двуглавой и главным образом ягодичным мышцам.
Фаза заднего шага . В начале этой фазы (непосредственно после окончания заднего толчка) маховая нога находится в положении разгибания, некоторого отведения и поворота внутрь, что приводит к повороту таза вместе с туловищем в противоположную сторону. Из этого положения нога, производящая шаг, начинает совершать сгибание в тазобедренном и коленном суставах, дополняемое незначительным поворотом ее наружу, что взаимосвязано с вращением таза в сторону маховой ноги. В это время основная нагрузка падает на мышцы: подвздошно-поясничную, приводящие, заднего отдела бедра и отчасти на разгибатели стопы.
Момент вертикали . Маховая нога выпрямлена в тазобедренном суставе и достигает максимального сгибания (по сравнению с другими фазами) в суставе колена. Сокращены главным образом мышцы заднего отдела бедра.
В фазе переднего шага мышцы заднего отдела бедра расслабляются и благодаря силе инерции и кратковременному баллистическому сокращению четырехглавой мышцы голень выбрасывается вперед. После этого начинается новый цикл движения.
Центр тяжести тела (ЦТ) при ходьбе (рис. 15.18, а) наряду с поступательными движениями (вперед), совершает еще движения боковые и в вертикальном направлении. В последнем случае размах (вверх и вниз) достигает величины 4 см (у взрослого человека), при этом туловище опускается больше всего именно тогда, когда одна нога опирается всей подошвой, а другая вынесена вперед. Боковые движения (качания в стороны) центра тяжести доходят до 2 см.
Колебания ОЦТ тела в стороны связаны с перемещением на опорную ногу всей массы тела, благодаря чему траектория ОЦТ тела проходит непосредственно над площадью опоры. Чем ходьба быстрее, тем эти колебательные движения меньше, что объясняется влиянием инерции тела.
Размер шага в среднем принимается за 66 см, при спокойной ходьбе продолжительность его — около 0,6 сек.
Помимо мышц нижних конечностей при ходьбе включаются в динамическую работу почти все мышцы туловища, шеи и верхних конечностей.
В связи с последовательным чередованием растяжения, сокращения и расслабления различных мышечных групп, что происходит во время ходьбы, значительная нагрузка на всю мышечную систему обычно не вызывает выраженного утомления. В значительной мере это также объясняется тем, что ритмические движения всего тела облегчают нормальную вентиляцию легких и улучшают кровообращение всех органов, включая центральную нервную систему (ЦНС). Таким образом, ходьба — это наилучший вид физической тренировки.
При ходьбе человек взаимодействует с опорной поверхностью, при этом возникают силовые факторы, называемые главным вектором и главным моментом сил реакции опоры. Типичные графики вертикальной и продольной составляющих главного вектора опорной реакции при ходьбе в произвольном темпе в норме представлены на рис. 15.18. Для графика вертикальной составляющей главного вектора опорной реакции характерно наличие двух вершин, соответствующих переднему (опора на пятку) и заднему (отталкивание передним отделом стопы) толчкам. Амплитуды этих вершин превышают массу человека и достигают 1,1 — 1,25Р (Р — масса человека).
Продольная составляющая главного вектора сил реакции опор имеет тоже две вершины разных знаков: первая, соответствующая переднему толчку, направлена вперед; вторая, соответствующая заднему толчку, направлена назад. Так оно и должно быть — отталкиваясь опорной ногой, человек устремляет все тело вперед. Максимумы продольной составляющей главного вектора опорной реакции достигает 0,25Р.
Есть еще одна составляющая главного вектора опорной реакции — поперечная. Она возникает при переступании с одной ноги на другую и ее максимум достигает 8-10% от массы человека.
Временная структура шага. Локомоции человека — процесс периодический, в котором через приблизительно равные промежутки времени повторяются сходные положения тела. Наименьшее время, прошедшее от данного положения до его повторения, является временем цикла. При ходьбе и беге время цикла называют по числу сделанных шагов «временем двойного шага». Каждая нога в своем циклическом движении находится либо на опоре, либо переносится на новое-место опоры (рис. 15.19).
При беге момент опоры меньше момента переноса; наблюдается период свободного полета над опорой (см. рис. 15.19).
Ходьба в норме
[Источник — Дубровский В.И., Федорова В.Н. Биомеханика]
Ходьба — автоматизированный двигательный акт, осуществляющийся в результате сложной координированной деятельности скелетных мышц туловища и конечностей.
Отталкиваясь от почвы, нога приводит тело в движение — вперед и несколько вверх и вновь совершает размах в воздухе.
Последовательность положения конечности взрослого человека при ходьбе показана на рис. 15.16. При ходьбе тело поочередно опирается то на правую, то на левую ногу.
Акт ходьбы отличается чрезвычайно точной повторяемостью отдель-ных его компонентов, так что каждый из них представляет точную копию в предыдущем шаге.
В акте ходьбы деятельное участие принимают также верхние конечно-сти человека: при выносе вперед правой ноги правая рука движется назад, а левая — выносится вперед. Руки и ноги человека при ходьбе совершают движения в противоположных направлениях.
Движение отдельных звеньев свободной ноги (бедра, голени и стопы) определяется не только сокращением мышц, но и инерцией. Чем ближе звено к туловищу, тем меньше его инерция и тем раньше оно может последовать за туловищем. Так, бедро свободной ноги перемещается вперед раньше всего, поскольку оно ближе всего к тазу. Голень, будучи дальше от таза, отстает, что ведет к сгибанию ноги в колене. Точно так же отставание стопы от голени вызывает сгибание в голеностопном суставе (см. рис. 15.16).
Последовательное вовлечение мышц в работу и точная координация их сокращений при ходьбе обеспечиваются у человека ЦНС и главным образом корой больших полушарий головного мозга. С точки зрения нервного механизма, ходьба представляет собой автоматизированный цепной рефлекс, в котором афферентная импульсация, сопровождающая каждый предыдущий элемент движения, служит сигналом для начала следующего.
Функциональный анализ ходьбы. Ходьба — это сложное циклическое локомоторное действие, одним из основных элементов которого является шаг (рис. 15.17).
При ходьбе, как и при других видах локомоторного движения, перемещение тела в пространстве происходит благодаря взаимодействию внутренних (сокращение мышц) и внешних (масса тела, сопротивление опорной поверхности и др.) сил. В каждом шаге, совершаемом правой и левой ногой, различают период опоры и период маха. Наиболее характерной особенностью всех видов ходьбы по сравнению с бегом и прыжками является постоянное опорное положение одной ноги (период одиночной опоры) или двух ног (период двойной опоры). Соотношение этих периодов обычно равно 4:1. Как период опоры, так и период маха может быть разделен на две основные фазы, а именно: период опоры — на фазы переднего толчка и заднего толчка, разделенные моментом вертикали; маха — фазы заднего шага и переднего шага, между которыми также находится момент вертикали.
Рис. 15.16. Ходьба в норме. Ширина и длина шага (а). Отклонение центра тяжести (ЦТ) во время ходьбы по вертикальной оси на 5 см (б). Отклонение ЦТ в сторону на 2,5 см (в) (по S. Hoppenfeld, 1983)
Рис. 15.17. Степень сокращения мышц туловища и нижней конечности
в течение двойного шага при обычной ходьбе (по данным электромиографического анализа, произведенного B.C. Гурфинкелем в ЦНИИТе протезирования и протезострое-ния). Черным цветом показано максимальное сокращение, двойным штрихом — сильное сокращение, одинарным — среднее сокращение, точками — слабое сокращение, белым показано расслабление мышцы: 1 — прямая мышца живота; 2 — прямая мышца бедра; 3 — передняя большеберцовая мышца; 4 — длинная малоберцовая мышца; 5 — икроножная мышца; 6 — полусухожильная мышца; 7 — двуглавая мышца бедра; S — большая яго-дичная мышца; 9 — мышца, натягивающая широкую фасцию; 10 — средняя ягодичная мышца; 11 — крестовоостистая мышца
Фаза переднего толчка. После заключительной фазы переднего шага начинается постановка стопы на почву при почти выпрямленном, но не закрепленном коленном суставе и согнутом, слегка отведенном и супиниро-ванном бедре. Стопа становится на опорную поверхность пяткой, после чего она совершает двойной перекат: с пятки на носок и снаружи внутрь. Этот перекат происходит под влиянием силы тяжести тела и последовательного включения в работу короткой малоберцовой мышцы, поднимающей наружу край стопы и далее мышц — длинной малоберцовой, задней большеберцовой, длинного сгибателя большого пальца стопы и длинного сгибателя пальцев, поддерживающих продольную дугу (свод) стопы. Такое движение стопы имеет двоякое значение: увеличение длины шага и растягивание мышц заднего отдела голени, участвующих в отталкивании тела. В начальном периоде опоры приобретает большое значение рессорная функция, выполняемая суставами стопы и незакрепленным суставом колена. Далее под действием тяжести и инерции тела нога несколько сгибается в коленном суставе и разгибается в голеностопном суставе при уступающей работе четырехглавой мышцы и мышц заднего отдела голени, что еще более повышает буферные свойства конечности.
Момент вертикали. К моменту вертикали нога выпрямляется и приводится за счет сокращения большей части мышц бедра и отчасти под влиянием силы тяжести. В это время стопа опирается на грунт всей подошвой, причем большинство ее мышц своим сокращением способствует сохранению сводов и участвует в функции удержания равновесия тела.
Фаза заднего толчка тела (отталкивание от опорной поверхности). В связи с этим контактирующая с грунтом конечность удлиняется за счет разгибания во всех ее суставах. В тазобедренном суставе вновь происходит некоторое отведение, но в отличие от переднего толчка, сопровождаемое небольшим поворотом бедра (внутрь). Ведущая роль в этой фазе принадлежит четырехглавой, полу сухожильной, полуперепончатой, длинной головке двуглавой и главным образом ягодичным мышцам.
Фаза заднего шага. В начале этой фазы (непосредственно после окончания заднего толчка) маховая нога находится в положении разгибания, некоторого отведения и поворота внутрь, что приводит к повороту таза вместе с туловищем в противоположную сторону. Из этого положения нога, производящая шаг, начинает совершать сгибание в тазобедренном и коленном суставах,
дополняемое незначительным поворотом ее наружу, что взаимосвязано с вращением таза в сторону маховой ноги. В это время основная нагрузка падает на мышцы: подвздошно-поясничную, приводящие, заднего отдела бедра и отчасти на разгибатели стопы.
Момент вертикали. Маховая нога выпрямлена в тазобедренном суставе и достигает максимального сгибания (по сравнению с другими фазами) в суставе колена. Сокращены главным образом мышцы заднего отдела бедра.
В фазе переднего шага мышцы заднего отдела бедра расслабляются и благодаря силе инерции и кратковременному баллистическому сокращению четырехглавой мышцы голень выбрасывается вперед. После этого начинается новый цикл движения.
Центр тяжести тела (ЦТ) при ходьбе (рис. 15.18, а) наряду с поступательными движениями (вперед), совершает еще движения боковые и в вертикальном направлении. В последнем случае размах (вверх и вниз) достигает величины 4 см (у взрослого человека), при этом туловище опускается больше всего именно тогда, когда одна нога опирается всей подошвой, а другая вынесена вперед. Боковые движения (качания в стороны) центра тяжести доходят до 2 см.
Колебания ОЦТ тела в стороны связаны с перемещением на опорную ногу всей массы тела, благодаря чему траектория ОЦТ тела проходит непо-средственно над площадью опоры. Чем ходьба быстрее, тем эти колебатель-ные движения меньше, что объясняется влиянием инерции тела.
Размер шага в среднем принимается за 66 см, при спокойной ходьбе продолжительность его — около 0,6 сек.
Помимо мышц нижних конечностей при ходьбе включаются в динамическую работу почти все мышцы туловища, шеи и верхних конечностей.
В связи с последовательным чередованием растяжения, сокращения и расслабления различных мышечных групп, что происходит во время ходьбы, значительная нагрузка на всю мышечную систему обычно не вызывает выраженного утомления. В значительной мере это также объясняется тем, что ритмические движения всего тела облегчают нормальную вентиляцию легких и улучшают кровообращение всех органов, включая центральную нервную систему (ЦНС). Таким образом, ходьба — это наилучший вид физической тренировки.
Кинематические и динамические характеристики человека между продольными осями смежных сегментов конечности можно измерять (так называемые межзвенные углы). На рис. 15.18 приведены графики межзвенных углов в тазобедренном суставе (ТБС), коленном (КС), голеностопном (ГСС) и плюснефаланговом (ПФС) при ходьбе в норме.
Характерной особенностью графиков этих углов (ангулограмм) является довольно стабильная периодичность. У разных людей меняются только продолжительность периода и диапазон изменений угла (амплитуда). В норме эти амплитуды составляют: в ТБС 26- 30°; в КС в опорный период шага 12-15°; в переносный период — 55-62°; в ГСС подошвенное сгибание равно 17-20°; тыльное — 8-10°. В ПФС всегда имеется тыльное сгибание при переносе (10-12°), при опоре сначала идет выпрямление до 0°, а при заднем толчке (от заднего толчка опорной ноги тело устремляется вперед) в ПФС снова происходит сгибание до 10-12°.
При ходьбе человек взаимодействует с опорной поверхностью, при этом возникают силовые факторы, называемые главным вектором и главным моментом сил реакции опоры. Типичные графики вертикальной и продольной составляющих главного вектора опорной реакции при ходьбе в произвольном темпе в норме представлены на рис. 15.18. Для графика вертикальной составляющей главного вектора опорной реакции характерно наличие двух вершин, соответствующих переднему (опора на пятку) и заднему (отталкивание передним отделом стопы) толчкам. Амплитуды этих вершин превышают массу человека и достигают 1,1-1.25Р (Р — масса человека).
Рис. 15.18. Перемещение общего центра тяжести (ОЦТ) тела при обычной
ходьбе (а). Графики межзвенных углов и опорных реакций при ходьбе
в норме: ТБС, КС, ГСС, ПФС — соответственно, тазобедренный, ко-ленный,
голеностопный, плюснефаланговый суставы; Rz, Ry — вертикальная
и продольная компоненты опорной реакции (б)
Продольная составляющая главного вектора сил реакции опор имеет тоже две вершины разных знаков: первая, соответствующая переднему толчку, направлена вперед; вторая, соответствующая заднему толчку, направлена назад. Так оно и должно быть — отталкиваясь опорной ногой, человек устремляет все тело вперед. Максимумы продольной составляющей главного вектора опорной реакции достигает 0,25Р.
Есть еще одна составляющая главного вектора опорной реакции — поперечная. Она возникает при переступании с одной ноги на другую и ее максимум достигает 8-10% от массы человека.
Временная структура шага. Локомоции человека — процесс периодический, в котором через приблизительно равные промежутки времени повторяются сходные положения тела. Наименьшее время, прошедшее от данного положения до его повторения, является временем цикла. При ходьбе и беге время цикла называют по числу сделанных шагов «временем двойного шага». Каждая нога в своем циклическом движении находится либо на опоре, либо переносится на новое место опоры (рис. 15.19).
При беге момент опоры меньше момента переноса; наблюдается пери-од свободного полета над опорой (см. рис. 15.19).
Рис. 15.19. Кинограммы ходьбы (а) и бега (б) на протяжении одиноч-ного шага
и диаграммы времени двойного шага (по Е. Muybriage, 1887; Д.А. Се-менову, 1939).
а — начало, е — конец опоры ноги, а и е — левая, а»е» — правая нога, ае — время опоры левой ноги, а»е» — время опоры правой ноги; вверху ае» и а»е» — время двойных опор при ходьбе, внизу е»а и еа» — время полета при беге. Непрерывная линия — опора, штриховая — перенос ноги
Источник: http://www.medicinform.net/revmo/ther_pop34.htm , автор, если я правильно понимаю — Угнивенко. Почему он боится подписаться — не знаю.
Стопа — это орган опорно-двигательной системы, состоящий из 26 костей, 33 суставов, сети из более 100 связок, сухожилий и мышц, покрытый кожей, которая со стороны подошвы имеет уникальное строение, которое позволяет ей переносить сжимающие нагрузки большой величины (до 200 кг на см2).
Стопа является сложным биомеханическим комплексом, выполняющим 3 важные задачи при обеспечении функции опоры и движения человека:
1) обеспечение опоры и равновесия при стоянии,
2) поглощение энергии удара в момент «приземления» и придание телу вертикального импульса в момент отталкивания от опоры, что необходимо для реализации естественных локомоций (ходьба, бег, прыжки),
3) защита опорно-двигательной системы от возможных травм и перегрузок.
(Я обожаю милую привычку русских людей пиздить картинки и материалы без указания источника. Откуда она взята, я не знаю, встречаю её раз в 3 или 4 в разных местах, конкретно эту взял здесь, кто автор статьи и художник — неизвестно http://www.ploscostopie.ru/specialists/chil_ortoped/stopa_i_osanka1/ — H.B.)
Стопа — это важная составная часть опорно-двигательной системы. Её функция и структура с одной стороны зависит от вышележащих элементов опорно-двигательного аппарата, а с другой стороны оказывает на них положительное или негативное влияние. Функция и структура стопы зависит от особенностей системы управления стоянием и локомоциями (от двигательного стереотипа) и от условий эксплуатации (особенности обуви, особенность и интенсивность повседневной двигательной активности).
Основное движение в стопе пронация — супинация…
Динамика стопы — это взаимодействие сил, действующих на стопу, и тех нагрузок и напряжений, которые возникают при воздействии этих сил. Стопа — это составная часть биомеханической системы опорно-двигательного аппарата и её динамика не может быть рассмотрена вне связи с этой системой. Динамика стопы это производная от движений опорно-двигательной системы (кинематики). Наиболее типовые движения человека, связанные с нагрузкой стопы — ходьба.
Стопа преодолевает очень большие по величине и по продолжительности повторяющиеся нагрузки. Скорость, на которой стопа «приземляется» на опору, составляет при быстрой ходьбе составляет 5 метров в секунду (18 км в час), а при беге до 20 м. в сек (70 км в час), что определяет силу столкновения с опорой равную 120-250% от веса тела. В течение дня обычный человек совершает от 2 до 6 тысяч шагов (за год — 860 000 — 2 085 600 шагов). Даже современные приборы — протезы стопы не служат при такой эксплуатации более 3 лет. Долговечность стопы человека определяется во первых совершенством механической конструкции и во вторых — уникальность материала, из которого «сделана» стопа.
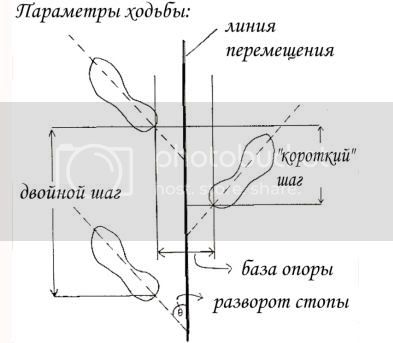
Наиболее общие параметры, характеризующие ходьбу . Такими параметрами являются линия перемещения центра масс тела, длина шага, длинна двойного шага, угол разворота стопы, база опоры, а так же скорость перемещения и ритмичность ходьбы.
База опоры — это расстояние между двумя параллельными линиями, проведенными через центры опоры пяток параллельно линии перемещения. База опоры определяет устойчивость тела человека.
Разворот стопы — это угол, образованный линией перемещения и линией, проходящей через середину стопы: через центр опоры пятки и точку между 1 и 2 пальцем. Чем больше разворот стопы, тем больше база опоры, но меньше эффективность ходьбы (и наоборот).
Короткий шаг — это расстояние между точкой опоры пятки одной ноги и центром опоры пятки противоположной ноги.
Ритмичность — число шагов в минуту. Для взрослого – 113 шагов в минуту.
Ритмичность — отношение длительности переносной фазы одной ноги к длительности переносной фазы другой ноги.
Скорость ходьбы — число больших шагов в единицу времени, измеряется в единицах: шаг в минуту или километр в час.
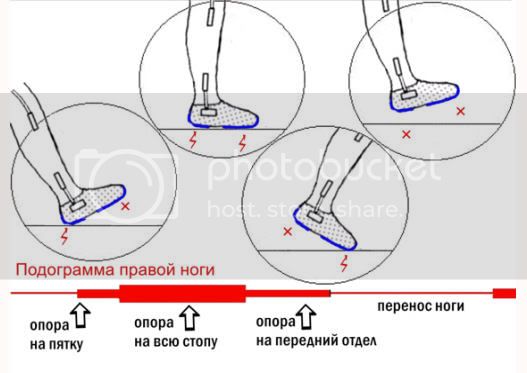
Рисунок. Методика подографии.
Методики исследования ходьбы
Кинематику ходьбы изучают с использованием контактных и бесконтактных датчиков измерения углов в суставах (гониометрия), а так же с применением гироскопов — приборов, позволяющих определить угол наклона сегмента тела относительно линии гравитации. Важным методом в исследовании кинематики ходьбы является методика циклографии — метод регистрации координат светящихся точек, расположенных на сегментах тела.
Динамические характеристики ходьбы изучают с применением динамографической (силовой) платформы. При опоре на силовую платформу регистрируют вертикальную реакцию опоры, а также горизонтальные её составляющие.
Для регистрации давления отдельных участков стопы применяют датчики давления или тензодатчики, вмонтированные в подошву обуви.
Физиологические параметры ходьбы регистрируют при помощи методики электромиографии – методики регистрации биопотенциалов мышц. Электромиография, сопоставленная с данными методик оценки временной характеристики, кинематики и динамики ходьбы, является основой биомеханического и иннервационного анализа ходьбы.
Подография позволяет регистрировать моменты контакта различных отделов стопы с опорой для оценки временной структуры ходьбы. На этом основании определяют временные фазы шага.
Рассмотрим пример исследования ходьбы, основанного на применении самой простой, двухконтактной электроподографии. Этот метод заключается в использовании контактов в подошве специальной обуви, которые замыкаются при опоре на биомеханическую дорожку. На рисунке изображена ходьба в специальной обуви с двумя контактами в области пятки и переднего отдела стопы. Период замыкания контакта регистрируется и анализируется прибором: замыкание заднего контакта — опора на пятку, замыкание заднего и переднего — опора на всю стопу, замыкание переднего контакта — опора на передний отдел стопы. На этом основании строят график длительности каждого контакта для каждой ноги.
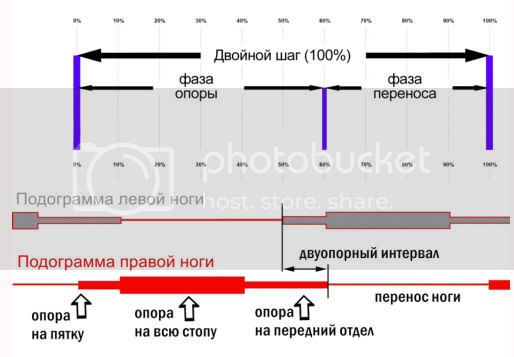
Рисунок. Временная структура ходьбы.
Существуют различные схемы временной структуры шага, предложенные различными биомеханическими школами. (Класс! Прямо «в военное время косинус 45 может достигать единицы». Только ссылки давать надо — H.B.)
График самой простой двухконтактной подограммы изображается в виде двух схем: подограмма правой ноги и подограмма левой ноги. Красным цветом выделена подограмма правой ноги. То есть той ноги, которая в данном случае начинает и заканчивает цикл ходьбы — двойной шаг. Тонкой линией обозначают отсутствие контакта с опорой, затем мы видим время контакта на задний отдел стопы, на всю стопу и на передний отдел.
Локомоторный цикл состоит из двух двуопорных и двух переносных фаз. По подограмме определяют интервал опоры на пятку, на всю стопу и на её передний отдел. Временные характеристики шага выражают в секундах и в процентах к продолжительности двойного шага, длительность которого принимают за 100%. Все остальные параметры ходьбы (кинематические, динамические и электрофизиологические) привязывают к подограмме — основному методу оценки временной характеристики ходьбы.
При ходьбе человек последовательно опирается то на одну, то на другую ногу. Эта нога называется опорной.
Контралатеральная (противоположная) нога в этот момент выносится вперёд (Это — переносная нога).
Период переноса ноги называется «фаза переноса «.
Полный цикл ходьбы — период двойного шага — слагается для каждой ноги из фазы опоры и фазы переноса конечности.
В опорный период активное мышечное усилие конечностей создаёт динамические толчки, сообщающие центру тяжести тела ускорение, необходимое для поступательного движения. При ходьбе в среднем темпе фаза опоры длится примерно 60% от цикла двойного шага, фаза опоры примерно 40%.
Рассмотрим наиболее общие перемещения тела в сагиттальной плоскости в процессе двойного шага. Началом двойного шага принято считать момент контакта пятки с опорой. В норме приземление пятки осуществляется на её наружный отдел (Ссылка где? Откуда взята норма? — H.B.) . С этого момента эта (правая) нога считается опорной. Иначе эту фазу ходьбы называют передний толчок — результат взаимодействия силы тяжести движущегося человека с опорой. На плоскости опоры при этом возникает опорная реакция, вертикальная составляющая корой превышает массу тела человека.

Рисунок. Сила реакции опоры.
Реакция опоры
Реальные силы при ходьбе, которые можно измерить — это силы реакции опоры. Сопоставление силы реакции опоры и кинематики шага позволяютувеличить оценить величину вращающего момента сустава.
Сила реакции опоры — это сила, действующая на тело со стороны опоры. Эта сила равна и противоположна той силе, которую оказывает тело на опору. Если при стоянии сила реакции опоры равна весу тела, то при ходьбе к этой силе прибавляются сила инерции и сила, создаваемая мышцами при отталкивании от опоры.
Для исследования силы реакции опоры обычно применяют динамографическую (силовую) платформу, которая вмонтирована в биомеханическую дорожку. При опоре в процессе ходьбы на эту платформу регистрируют возникающие силы — силы реакции опоры. Силовая платформа позволяет регистрировать результирующий вектор силы реакции опоры.
Динамическая характеристика ходьбы оценивается путём исследования опорных реакций , которые отражают взаимодействие сил , принимающих участие в построении локомоторного акта:
— мышечных,
— гравитационных и
— инерционных.
Вектор опорной реакции в проекции на основные плоскости разлагается на три составляющие:
— вертикальную,
— продольную и
— поперечную.
Эти составляющие позволяют судить об усилиях, связанных с вертикальным, продольным и поперечным перемещением общего центра масс.
Сила реакции опоры включает в себя
— вертикальную составляющую, действующую в направлении вверх-вниз,
— продольную составляющую, направленную вперед-назад по оси Y, и
— поперечную составляющую, направленную медиально-латерально по оси X.
Это производная от силы мышц, силы гравитации и силы инерции тела.

Рисунок. Вертикальная составляющая опорной реакции.
Вертикальная составляющая вектора опорной реакции.
График вертикальной составляющей опорной реакции при ходьбе в норме имеет вид плавной симметричной двугорбой кривой. Первый максимум кривой соответствует интервалу времени, когда в результате переноса тяжести тела на опорную ногу происходит передний толчок, второй максимум (задний толчок) отражает активное отталкивание ноги от опорной поверхности и вызывает продвижение тела вверх, вперёд и в сторону опорной конечности.
Оба максимума расположены выше уровня веса тела и составляют соответственно при медленном темпе примерно 100% от веса тела, при произвольном темпе 120%, при быстром — 150% и 140%. (Ссылки! Откуда эти данные опять? С потолка? — H.B.)
Минимум опорной реакции расположен симметрично между ними ниже линии веса тела. Возникновение минимума обусловлено задним толчком другой ноги и последующим её переносом; при этом появляется сила, направленная вверх, которая вычитается из веса тела. Минимум опорной реакции при разных темпах составляет от веса тела соответственно: при медленном темпе — примерно 100%, при произвольном темпе 70%, при быстром — 40%.
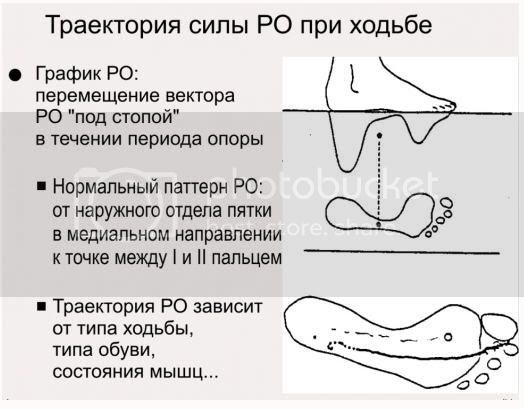
Рисунок. Точка приложения вектора реакции опоры.
Точка приложения вектора реакции опоры на стопу иначе называется центром давления. Это важно, для того чтобы знать, где находится точка приложения сил, действующих на тело со стороны опоры. При исследовании на силовой платформе эта точка называется точкой приложения силы реакции опоры .
Траектория силы реакции опоры в процессе ходьбы изображается в виде графика: «зависимость величины силы реакции опоры от времени опорного периода». График представляет собой перемещение вектора реакции опоры под стопой. Нормальный паттерн, траектория перемещения реакции опоры при нормальной ходьбе представляет собой перемещение от наружного отдела пяти вдоль наружного края стопы в медиальном направлении к точке между 1 и 2 пальцем стопы.
Траектория перемещения вариабельна и зависит от темпа и типа ходьбы, от рельефа поверхности опоры, от типа обуви, а именно от высоты каблука и от жёсткости подошвы. Паттерн реакции опоры во многом определяется функциональным состоянием мышц нижней конечности и иннервационной структурой ходьбы.
Важную информацию о распределении давления на различные участки стопы получают при помощи тензометрических измерений. Тензодатчики — датчики давления — располагают в специальной стельке для обуви. Этот метод исследования позволяет изучить не результирующую силу реакции опоры, как при динамометрическом методе, а распределение давления под разными отделами стопы.
Особенности биомеханики стопы при ходьбе
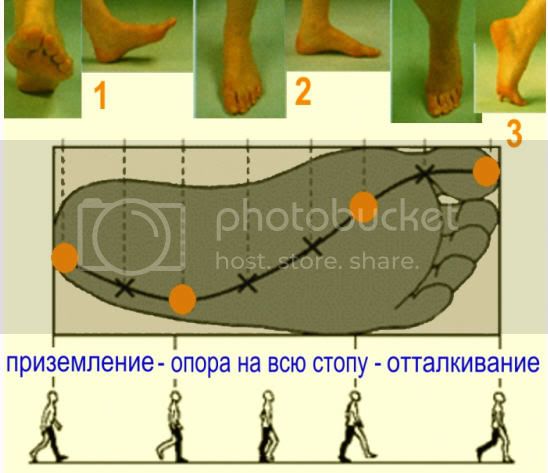 Рисунок. Фазы опорной реакции.
Рисунок. Фазы опорной реакции.
При ходьбе стопа выполняет четыре основные функции:
— адаптация к неровностям поверхности,
— поглощение энергии удара при приземлении,
— функцию жёсткого рычага для передачи вращательного момента вышележащим сегментам,
— перераспределение и смягчение ротационных усилий вышележащих сегментов.
Биомеханика стопы и функции стопы в различные фазы шага — различны. Если в фазу амортизации основная задача стопы — смягчение удара при контакте с поверхностью, то в период опоры на всю стопу задача стопы — перераспределение энергии для эффективного выполнения следующей фазы — отталкивания от опоры . Эта фаза ставит перед стопой задачу передачи лежащим выше сегментам силы реакции опоры.
Смягчение инерционной нагрузки при ходьбе и беге осуществляется сложным комплексом суставно-связочного аппарата, соединяющего 26 основных костей стопы, в котором выделяют 3 продольных и поперечный свод .
Рассмотрим строение только одного из них — среднего продольного свода . Пяточная, таранная и кости плюсны и предплюсны образуют своеобразную арку — рессору, способную уплощаться и расправляться. Нагрузка — вес тела — распределяется равномерно на передний и задний отдел стопы. Передний и задний отделы стопы соединены в единую кинематическую цепь мощным эластичным сухожилием — подошвенным апоневрозом, который подобно пружине возвращает распластанный под нагрузкой свод стопы (см. статью «стопа в статике»).
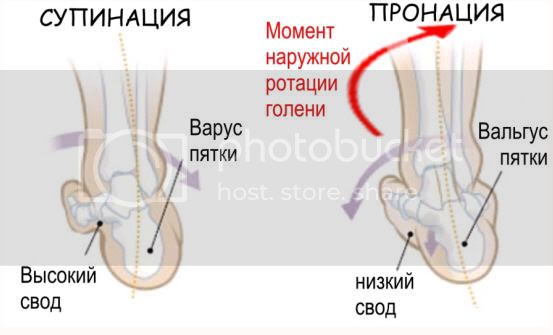 Рисунок. Супинация и пронация стопы.
Рисунок. Супинация и пронация стопы.
Рассмотрим точки приложения реакции опоры к стопе в процессе фазы опоры. Стопа приземляется на наружный отдел пятки. Затем на протяжении фазы приземления центр силы реакции опоры смещается к центру стопы в фазе опоры на всю стопу и на её передний внутренний отдел в фазу отталкивания.
Биомеханический смысл такой траектории перемещения точки приложения силы реакции опоры заключается в том, что при этом в различные фазы опоры создаются вращающие моменты , которые вызывают следующие движения в суставах стопы:
— супинация стопы — варус пятки и переднего отделов (рисунок 1); (Полая стопа, косолапие — H.B.)
— пронация стопы — вальгус переднего отдела и пятки , распластывание стопы (рисунок 2); (Плоскостопие — H.B.)
— вновь пронация стопы, при которой суставы стопы замыкаются и стопа приобретает жёсткость, необходимую для передачи энергии верхним сегментам (рисунок 3).
При опоре на всю стопу суставы размыкаются, стопа легко адаптируется к поверхности опоры. В этот период сухожилие стопы запасает энергию в виде энергии упругих связей, которую затем возвращает в период отталкивания.
Пронация стопы — результат внутренней ротации бедра в первую половину опоры ноги. При опоре на пятку колено подгибается, бедро ротируется внутрь, это ускоряет перекат через пятку и перенос веса тела на всю стопу. Затем стопа неизбежно распластывается, и энергия движения переходит в энергию упругих связей стопы.
Таким образом, во время ходьбы мы можем наблюдать два паттерна движений в суставах стопы: супинация и пронация.
При супинации стопа вращается внутрь за счёт подтаранного сустава, пятка находится в положении варуса, свод высокий . Суставы стопы находятся в положении замыкания, что обеспечивает необходимую жёсткость стопы при приземлении и отталкивании.
При пронации стопы мы видим обратный паттерн: продольный свод опускается, пятка в подтаранном суставе принимает положение вальгуса, суставы размыкаются, стопа легко адаптируется к опоре.
Отметим, что продольный свод стопы активно удерживает передняя большеберцовая мышца, дополнительно смягчает инерцию приземления и возвращает жёсткость стопы при отталкивании. В момент пронации стопа создает вращательный момент голени — момент наружной ротации.
 Рисунок 20. Движение в подтаранном суставе.
Рисунок 20. Движение в подтаранном суставе.
Движение — пронация стопы — это вращение в подтаранном суставе
Ось этого сустава расположена косо, таким образом, что пронация стопы приводит к ротации голени. Это важно для рассмотрения вопроса «особенности биомеханики коленного сустава при ходьбе». Ось подтаранного сустава расположена косо в направлении спереди назад, изнутри кнаружи. Она явно не совпадает с направлением оси голеностопного и коленного суставов. Однако, именно такое её положение (явно несоосное с другими суставами) определяет эффективность ходьбы.
 Рисунок. Распределение нагрузки в период опоры на стопу при ходьбе.
Рисунок. Распределение нагрузки в период опоры на стопу при ходьбе.
На рисунке мы видим, что первый пик нагрузки получается из контакта наружного отдела пятки с опорой, этот пик находится в первой фазе, в фазе переднего толчка. По мере переката через пятку нагрузка перемещается более на медиальный отдел пятки. Затем, нагрузка перемещается последовательно на 5, 4, 3 и затем вторую плюсневую кость. Это характерно для фазы опоры на всю стопу.
И в фазе отталкивания, в фазе опоры на передний отдел, нагрузка перемещается на первую плюсневую кость и большой палец ноги. Подгибание первого пальца и отталкивание от опоры завершает опорную фазу шага. Стопа отрывается от опоры.
Как мы уже говорили, результирующая, полученная при сложении всех сил, которые формируются при приземлении, опоре и отталкивании, выглядит в виде двугорбой кривой. Здесь следует отметить, что силы, определяющие реакцию опоры, имеют различное направление. Если при приземлении, силы гравитации и инерции направлены вниз, то при отталкивании сила активного сокращения мышц и инерции тела — вверх. При приземлении ноги мышцы работают в уступающем режиме и гасят энергию удара. Для реализации этого механизма необходима трансформация поступательного движения во вращательное . Один из таких механизмов мы рассмотрели выше: опора на пятку приводит к вращению относительно подтаранного сустава, пронация стопы приводит к наружной ротации голени и таким образом энергия приземления передается к вышележащим сегментам. Однако, этого недостаточно для полноценного поглощения переднего толчка.
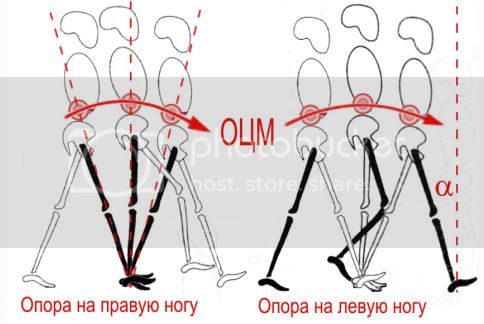 Рисунок. Модель обратного маятника.
Рисунок. Модель обратного маятника.
Рассмотрим ещё один важный биомеханический механизм — вращение относительно голеностопного сустава. Для этого представим себе идущего человека в виде обратного маятника с центром вращения в голеностопном суставе. Мы видим, как при опоре на пятку возникает вращающий момент, голень под влиянием силы инерции наклоняется вперёд, возникает целый каскад вращения в вышележащих суставах ноги, и общий центр масс тела совершает поступательное движение вперед. Схема, представленная на рисунке, не совсем точна, на ней (для упрощения) не изображён очень важный момент, очень важный механизм — подгибание в коленном суставе в момент опоры на пятку. Этот и многие другие механизмы трансформации движений при ходьбе, мы возможно рассмотрим в других статьях, посвященных биомеханике ходьбы.
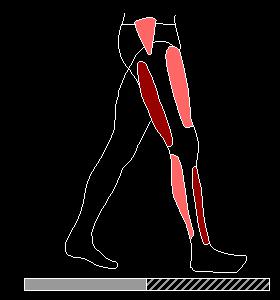 Рисунок. Уступающая и преодолевающая работа мышц при ходьбе.
Рисунок. Уступающая и преодолевающая работа мышц при ходьбе.
Для того, чтобы получить общее представление о работе мышц при ходьбе, которые являются не только источником энергии поступательного движения, но и выполняют важную функцию поглощения и перераспределения энергии в первую фазу опоры посмотрите на рисунок. Мышцы нижней конечности работают то в уступающем, то в преодолевающем режиме, то есть то притормаживают, то ускоряют движения в суставах, обеспечивая плавное поступательное движение общего центра массы.
Стопа является первым самым нагружаемым звеном этой сложной трансмиссии. Она осуществляет контакт с опорой, она перераспределяет силу реакции опоры на вышележащие сегменты опорно-двигательного аппарата и выполняет важную рессорную функцию, она обеспечивает устойчивость ноги и сцепление с опорной поверхностью.
Способность стопы противостоять нагрузкам обусловлена не только биомеханическим совершенством, но и свойством составляющих её тканей. Короткие и прочные кости стопы имеют форму, точно соответствующую направлению и величине нагрузки.
Известный закон биологии гласит «Функция определяет форму», из этого вытекают прошедшие проверку временем и практикой постулаты: «механические напряжения полностью определяют все детали структуры» и «кость разрастается преимущественно по направлению тяги и перпендикулярно плоскости давления». Структура нагрузки повседневных движений влияет и на рост детского скелета (например, быстрее растёт более нагружаемая толчковая, обычно правая, нога), и на структуру скелета у взрослых. Внешняя форма костей может изменяться под влиянием различных видов спорта или профессиональных движений. Они становятся массивнее и толще за счёт увеличения костной массы в наиболее нагружаемых участках. Таким образом, кости стопы адаптируют свою прочность в соответствии с весом человека и с повседневной двигательной активностью.
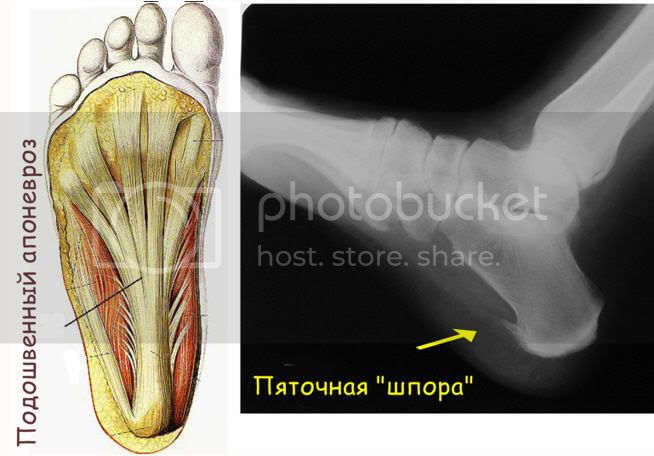 Рисунок. Подошвенный апоневроз и пяточная шпора.
Рисунок. Подошвенный апоневроз и пяточная шпора.
Аналогичный закон действует и в отношении соединительнотканных структур стопы (связок, сухожилий и фасций). Волокна самой мощной фасции стопы — подошвенного апоневроза ориентированы вдоль самого нагружаемого продольного свода стопы (рис.).
Если повторяющиеся нагрузки по своей величине или продолжительности превышают возможности тканей стопы, то в них развиваются патологические реакции перегрузки и патологические процессы, такие как воспаление сухожилия, усталостные переломы, разрывы сухожилий… Например, отложение солей кальция в области прикрепления подошвенного апоневроза к бугру пяточной кости, которое именуется пяточной шпорой.
Плоскостопие, гиподинамия, избыточные спортивные нагрузки — обычная причина этих заболеваний. Но об этом в другой статье. (Ссылочки не забудьте — H.B.)
http://www.ploscostopie.ru/specialists/chil_ortoped/stopa_i_osanka1/ Автор статьи неизвестен, источник картинок — тоже. Но картинку с ротацией я вижу раз в 3 или 4.
Стопа и осанка
Какая связь между этими, казалось бы, отдалёнными частями тела: стопой и позвоночником? Прямая!Наше тело от стоп до макушки — это отточенная эволюцией конструкция, где все звенья взаимосвязаны.
Стопы — «фундамент» тела, изъяны фундамента неизбежно вызывают перекос всей конструкции, нарушают осанку и походку человека, приводя к болям в позвоночнике и преждевременному «износу» суставов. По данным литературы, не менее чем у 80 % населения возникают проблемы опорно-двигательного аппарата, напрямую или опосредованно связанные с деформациями стопы.
Начальные элементы деформаций и функциональные недостатки стоп и осанки закладываются в детстве и следуют за человеком в его взрослую жизнь.
Считается, что с первых шагов ребёнка и до старости человек пешком огибает землю 4 раза. Стопа — это комплексная структура, состоящая из 26 костей, соединённых связками, суставами, мышцами и сухожилиями.
При рождении стопы детей ещё не сформированы, а будущие костные структуры представлены хрящом. Своды стоп, как и изгибы позвоночного столба, начинают активно формироваться с началом прямохождения. Первый этап формирования сводов стопы и осанки завершается к 8-9 годам, когда очертания стопы и спины ребёнка начинают быть похожими на формы взрослого человека. В период гормонального созревания происходит дальнейшая перестройка, направленная на функциональное совершенствование структур стопы и осанки.
Рисунок. Компенсаторный сколиоз в результате вальгусного отклонения стопы
Рисунок. Восходящая цепь перегрузок и повреждения при плоско-вальгусных стопах