Флеш игры футбол головами апл. Игры футбол. Количество перерастает в качество
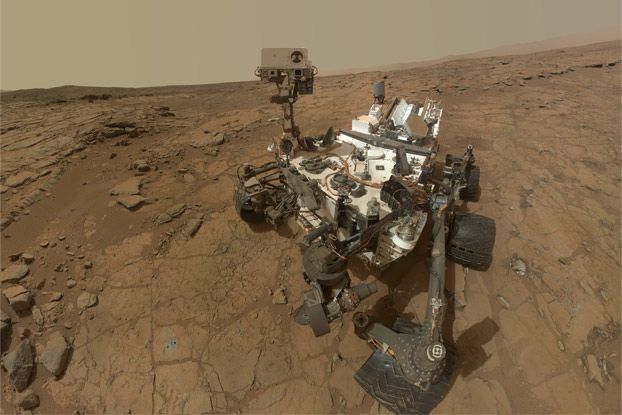
Быть человеком куда проще, чем создать человека. Возьмите, к примеру, процесс игры в мяч в детстве с другом. Если разложить эту деятельность на отдельные биологические функции, игра перестанет быть простой. Вам нужны датчики, передатчики и эффекторы. Вам нужно рассчитывать, как сильно бить по мячу, чтобы он сократил дистанцию между вами и вашим компаньоном. Вам нужно учитывать солнечные блики, скорость ветра и все, что может отвлечь. Нужно определить, как вращается мяч и как нужно его принимать. И остается пространство для посторонних сценариев: что, если мяч пролетит над головой? Перелетит через забор? Выбьет окно соседу?
Эти вопросы демонстрируют некоторые из наиболее острых проблем робототехники, а также закладывают основу для нашего обратного отсчета. Перед вами список из десяти самых сложных вещей, которым нужно научить роботов. Эту десятку мы должны победить, если когда-нибудь хотим реализовать обещания, сделанные Брэдбери, Диком, Азимовым, Кларком и другими фантастами, которые видели воображаемые миры, где машины ведут себя как люди.
Проложить путь
Передвижение из точки А в точку Б казалось нам простым с детства. Мы, люди, делаем это каждый день, каждый час. Для робота, однако, навигация — особенно через единую среду, которая постоянно изменяется, или через среду, которую он раньше не видел — сложнейшая вещь. Во-первых, робот должен быть способен воспринимать окружающую среду, а также понимать все входящие данные.
Робототехники решают первую проблему, вооружая свои машины массивом датчиков, сканеров, камер и других высокотехнологичных инструментов, которые помогают роботам оценить свое окружение. Лазерные сканеры становятся все более популярными, хотя их нельзя использовать в водной среде из-за того, что свет серьезно искажается в воде. Технология сонара кажется жизнеспособной альтернативой для подводных роботов, но в наземных условиях она куда менее точна. Кроме того, «видеть» свой пейзаж роботу помогает система технического зрения, состоящая из набора интегрированных стереоскопических камер.
Собрать данные об окружающей среде — это только полдела. Куда более сложной задачей будет обработка этих данных и использование их для принятия решений. Многие разработчики управляют своими роботами, используя предопределенную карту или составляя ее на лету. В робототехнике это известно как SLAM — метод одновременной навигации и составления карты. Составление карты здесь означает то, как робот преобразует информацию, полученную датчиками, в определенную форму. Навигация же подразумевает то, как робот позиционирует себя относительно карты. На практике эти два процесса должны протекать одновременно, в форме «курицы и яйца», что выполнимо только при использовании мощных компьютеров и продвинутых алгоритмов, вычисляющих положение на основе вероятностей.
Продемонстрировать ловкость
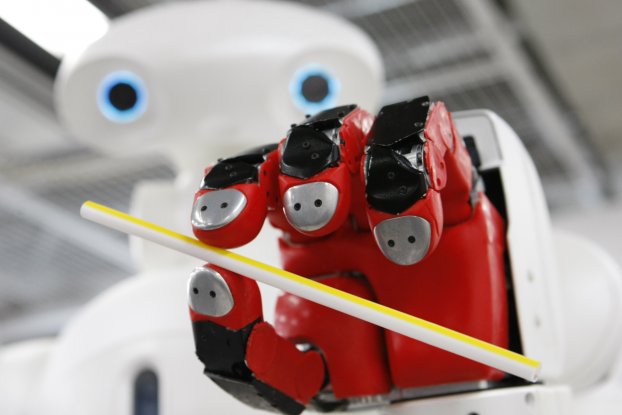
Роботы собирают упаковки и детали на заводах и складах уже много лет. Но в таких ситуациях они, как правило, не встречаются с людьми и практически всегда работают с одинаковыми по форме объектами в относительно свободной среде. Жизнь такого робота на заводе скучна и заурядна. Если же робот хочет работать на дому или в больнице, для этого ему понадобится обладать продвинутым осязанием, способностью обнаруживать людей поблизости и безупречный вкус в плане выбора действий.
Этим навыкам робота крайне сложно обучить. Обычно ученые вообще не обучают роботов прикосновениям, программируя их на провал, если они вступают в контакт с другим объектом. Однако за последние пять лет или около того были достигнуты значительные успехи в совмещении податливых роботов и искусственной кожи. Податливость относится к уровню гибкости робота. Гибкие машины более податливы, жесткие — менее.
В 2013 году исследователи из Georgia Tech создали роботизированный манипулятор с пружинными суставами, которые позволяют манипулятору сгибаться и взаимодействовать с предметами, подобно человеческой руке. Затем они покрыли все это «кожей», способной распознавать давление или прикосновение. Некоторые виды кожи роботов содержат шестигранные микросхемы, каждая из которых оснащена инфракрасным сенсором, который регистрирует любое приближение ближе чем на сантиметр. Другие оснащаются электронными «отпечатками пальцев» — ребристой и шероховатой поверхностью, которая улучшает сцепление и облегчает обработку сигнала.
Объедините эти высокотехнологичные манипуляторы с продвинутой системой зрения — и вы получите робота, который может сделать нежный массаж или перебрать папку с документами, выбрав нужный из огромной коллекции.
Поддержать беседу

Алан Тьюринг, один из основателей компьютерной науки, сделал в 1950 году смелый прогноз: однажды машины смогут говорить так свободно, что вы не сможете отличить их от людей. Увы, пока роботы (и даже Siri) не оправдали ожиданий Тьюринга. Все потому, что распознавание речи значительно отличается от обработки естественного языка — то, что делают наши мозги, извлекая смысл из слов и предложений в процессе беседы.
Первоначально ученые думали, что повторить это будет так же просто, как подключить правила грамматики к памяти машины. Но попытка запрограммировать грамматические примеры для каждого отдельного языка попросту провалилась. Даже определить значения отдельных слов оказалось весьма сложно (ведь есть такое явление, как омонимы — ключ от двери и ключ скрипичный, например). Люди научились определять значения этих слов в контексте, опираясь на свои умственные способности, развитые за многие годы эволюции, но разбить их снова на строгие правила, которые можно положить на код, оказалось просто невозможно.
В результате многие роботы сегодня обрабатывают язык, основываясь на статистике. Ученые скармливают им огромные тексты, известные как корпусы, а затем позволяют компьютерам разбивать длинные тексты на куски, чтобы выяснить, какие слова часто идут вместе и в каком порядке. Это позволяет роботу «учить» язык, основываясь на статистическом анализе.
Научиться новому

Представим, что кто-то, кто никогда не играл в гольф, решил научиться размахивать клюшкой. Он может прочитать книгу об этом, а затем попробовать или же наблюдать за тем, как практикуется известный гольфист, и потом попробовать самостоятельно. В любом случае освоить азы можно будет просто и быстро.
Робототехники сталкиваются с определенными проблемами, когда пытаются построить автономную машину, способную обучаться новым навыкам. Один из подходов, как в случае с гольфом, заключается в том, чтобы разбить активность на точные шаги, а затем запрограммировать их в мозге робота. Это предполагает, что каждый аспект активности нужно разделить, описать и закодировать, что не всегда-то и легко сделать. Существуют определенные аспекты в размахивании клюшкой для гольфа, которые и словами-то сложно описать. Например, взаимодействие запястья и локтя. Эти тонкие детали легче показать, чем описать.
За последние годы ученые добились определенного успеха в обучении роботов имитировать человека-оператора. Они называют это имитационным обучением, или обучением по демонстрации (методика LfD). Как они это делают? Вооружают машины массивами широкоугольных и масштабирующих камер. Это оборудование позволяет роботу «видеть» учителя, выполняющего определенные активные процессы. Обучающие алгоритмы обрабатывают эти данные для создания математической карты функций, которая объединяет визуальный ввод и желаемые действия. Конечно, роботы LfD должны уметь игнорировать определенные аспекты поведения своего учителя — вроде зуда или насморка — и справляться с похожими проблемами, которые рождаются из-за разницы в анатомии робота и человека.
Обманывать

Любопытное искусство обмана развивалось еще у животных, чтобы обойти конкурентов и не быть съеденным хищниками. На практике обман как искусство выживания может быть весьма и весьма эффективным механизмом самосохранения.
Роботам же научиться обманывать людей или других роботов может быть невероятно сложно (и, возможно, хорошо для нас с вами). Обман требует наличия воображения — способности формировать идеи или образы внешних объектов, не связанных с чувствами — а у машины его, как правило, нет. Они сильны в прямой обработке данных с датчиков, камер и сканеров, но не могут формировать концепции, которые выходят за пределы сенсорных данных.
С другой стороны, роботы будущего могут лучше разбираться в обмане. Ученые Georgia Tech смогли передать некоторые навыки обмана белок роботам в лаборатории. Сначала они изучали хитрых грызунов, которые защищают свои тайники с пищей, заманивая конкурентов в старые и неиспользуемые хранилища. Затем закодировали это поведение в простые правила и загрузили в мозги своих роботов. Машины смогли использовать эти алгоритмы для определения, когда обман может быть полезным в конкретной ситуации. Следовательно, могли обмануть своего компаньона, заманив его в другое место, в котором нет ничего ценного.
Предвидеть действия человека
В «Джетсонах» робот-горничная Рози была в состоянии поддерживать беседу, готовить еду, убирать и помогать Джорджу, Джейну, Джуди и Элрою. Чтобы понять качество сборки Рози, достаточно вспомнить один из начальных эпизодов: мистер Спейсли, босс Джорджа, приходит в дом Джетсонов на ужин. После трапезы он вынимает сигару и помещает ее в рот, а Рози бросается вперед с зажигалкой. Это простое действие представляет собой сложное поведение человека — умение предвидеть, что будет дальше, на основе того, что только что произошло.
Как и обман, предвосхищение человеческих действий требует от робота представления будущего состояния. Он должен быть в состоянии сказать: «Если я вижу, что человек делает А, значит, как я могу предположить на основе прошлого опыта, скорее всего, он сделает Б». В робототехнике этот пункт был крайне сложным, но люди делают определенный прогресс. Команда Корнелльского университета разработала автономного робота, который мог реагировать на основе того, как компаньон взаимодействует с объектами окружающей среды. Для этого он использует пару 3D-камер, чтобы получить изображение окружения. Затем алгоритм определяет ключевые объекты в комнате и выделяет их на фоне остальных. Затем, используя огромное количество информации, полученной в результате предыдущих тренировок, робот вырабатывает набор определенных ожиданий движений от персоны и объектов, которые она трогает. Робот делает выводы относительно того, что будет дальше, и действует соответственно.
Иногда Корнелльские роботы ошибаются, но довольно уверенно продвигаются вперед, в том числе и по мере того, как улучшаются технологии камер.
Координировать деятельность с другими роботами
Строительство единой крупномасштабной машины — даже андроида, если хотите — требует серьезных вложений времени, энергии и денег. Другой подход предполагает развертывание армии из более простых роботов, которые могут действовать вместе для достижения сложных задач.
Возникает ряд проблем. Робот, работающий в команде, должен уметь хорошо себя позиционировать в связи с товарищами и быть в состоянии эффективно общаться — с другими машинами и оператором-человеком. Для решения этих проблем ученые обратились к миру насекомых, которые используют сложное роевое поведение для поиска еды и решают задачи, которые приносят пользу всей колонии. Например, изучая муравьев, ученые поняли, что отдельные особи используют феромоны для связи друг с другом.
Роботы могут использовать эту же «феромонову логику», только полагаться на свет, а не на химические вещества, при общении. Работает это так: группа крошечных роботов рассредоточена в ограниченном пространстве. Сначала они исследуют эту область случайным образом, пока один не натыкается на световой след, оставленный другим ботом. Он знает, что нужно идти по следу, и идет, оставляя собственный след. По мере того как следы сливаются в один, все больше и больше роботов следуют друг за другом гуськом.
Самокопироваться

Господь сказал Адаму и Еве: «Плодитесь и размножайтесь, и наполняйте землю». Робот, который получил бы такую команду, почувствовал бы смущение или разочарование. Почему? Потому что он не способен размножаться. Одно дело построить робота, но совсем другое — создать робота, который сможет делать копии самого себя или регенерировать утраченные или поврежденные компоненты.
Что примечательно, роботы могут и не брать людей за пример репродуктивной модели. Возможно, вы заметили, что мы не делимся на две одинаковые части. Простейшие, однако, делают это постоянно. Родственники медуз — гидры — практикуют форму бесполого размножения, известную как бутонизацию: небольшой шарик отделяется от тела родителя, а затем отрывается, чтобы стать новым, генетически идентичным индивидуумом.
Ученые работают над роботами, которые смогут выполнять такую же простую процедуру клонирования. Многие из этих роботов построены из повторяющихся элементов, как правило кубов, которые сделаны по образу и подобию одного куба, а также содержат программу саморепликации. У кубиков есть магниты на поверхности, поэтому они могут присоединяться и отсоединяться от других кубов поблизости. Каждый кубик делится на две части по диагонали, поэтому каждая половина может существовать независимо. Весь же робот содержит несколько кубиков, собранных в определенную фигуру.
Действовать из принципа

Когда мы ежедневно общаемся с людьми, мы принимаем сотни решений. В каждом из них мы взвешиваем каждый наш выбор, определяя, что есть хорошо, а что есть плохо, честно и нечестно. Если бы роботы хотели быть похожи на нас, им нужно было бы понять этику.
Но как и в случае с языком, закодировать этическое поведение крайне сложно главным образом потому, что единого набора общепринятых этических принципов не существует. В разных странах существуют разные правила поведения и разные системы законов. Даже в отдельных культурах региональные различия могут повлиять на то, как люди оценивают и измеряют свои действия и действия окружающих. Попытка написать глобальную и подходящую всем роботам этику оказывается практически невозможной.
Именно поэтому ученые решили создавать роботов, ограничивая масштабы этической проблемы. Например, если машина будет работать в определенной среде — на кухне, скажем, или в палате пациента — у нее будет гораздо меньше правил поведения и меньше законов для принятия этически обоснованных решений. Для достижения этой цели инженеры-робототехники вводят основанный на этике выбор в алгоритм обучения машины. Выбор этот основывается на трех гибких критериях: к чему хорошему приведет действие, какой вред оно нанесет и мере справедливости. Используя этот тип искусственного интеллекта, ваш будущий домашний робот сможет точно определить, кто в семье должен мыть посуду, а кому достанется пульт от телевизора на ночь.
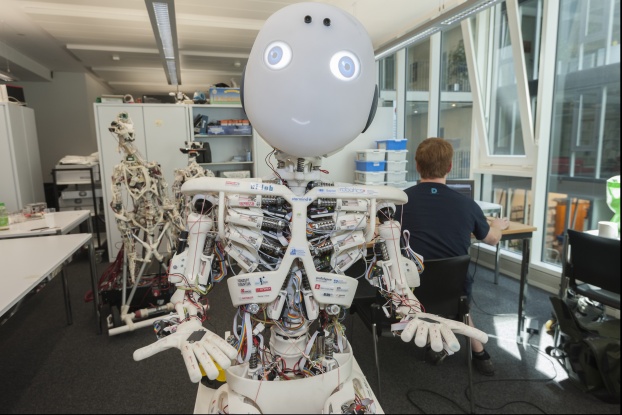
Чувствовать эмоции

«Вот мой секрет, он очень прост: зорко одно лишь сердце. Самого главного глазами не увидишь».
Если это замечание Лиса из «Маленького принца» Антуана де Сент-Экзюпери верно, то роботы не увидят самого прекрасного и лучшего в этом мире. В конце концов, они отлично зондируют мир вокруг, но не могут превращать сенсорные данные в конкретные эмоции. Они не могут увидеть улыбку любимого человека и почувствовать радость, или же зафиксировать гневную гримасу незнакомца и задрожать от страха.
Именно это, больше чем что-либо другое в нашем списке, отделяет человека от машины. Как научить робота влюбляться? Как запрограммировать разочарование, отвращение, удивление или жалость? Стоит ли вообще пытаться?
Некоторые думают, что стоит. Они считают, что роботы будущего будут совмещать когнитивные и эмоциональные системы, а значит, лучше работать, быстрее учиться и эффективнее взаимодействовать с людьми. Верьте или нет, прототипы таких роботов уже существуют, и они могут выражать ограниченный диапазон человеческих эмоций. Nao, робот, разработанный европейскими учеными, обладает эмоциональными качествами годовалого ребенка. Он может выражать счастье, злость, страх и гордость, сопровождая эмоции жестами. И это только начало.
Дек 24, 2017 Геннадий
Source: nauka.boltai.com
Роботы крепко вошли в нашу современную жизнь. Они безустанно помогают людям на заводах, в больницах, выполняют сложнейшие вычисления и им не нужно платить зарплату. Времена, когда машины начнут помогать нам по хозяйству или обучать детей уже наступили, просто не все об этом еще знают.
1. «Социальный» робот «Jibo»
«Jibo» — это милый маленький «социальный» робот с характером, который может легко стать лучшим другом семьи. Робот с остроумным чувством юмора имеет необычный внешний вид и забавную анимацию, которая вращается и танцует. «Jibo» — не просто игрушка, а высокотехнологическая разработка. Используя технологию искусственного интеллекта, камеры и микрофоны робот способен изучать голоса, эмоции и лица шестнадцати разных людей.
«Jibo» может выполнять ряд полезных задач: начиная установкой будильника, фотографированием, прогнозированием погоды и заканчивая общением с человеком. При этом интонацию и фразы робот подбирает в зависимости от собеседника. «Jibo» уже имеется в продаже за $900.
2. Робот-гений «Профессор Эйнштейн»
Робот выполнен в виде карикатурной версии Альберта Эйнштейна и позиционируется как обучающий инструмент для людей разного возраста. Помимо широкой базы знаний робот также обладает хорошим чувством юмора, что делает процесс обучения более увлекательным. С «Эйнштейном» вы не только можете обучаться точным наукам, но и играть в различные обучающие игры.
Для ответов на всевозможные вопросы робот использует облачную базу данных. Кроме ответов на вопросы «Профессор Эйнштейн» может вести диалог с собеседником и имеет в наличии пятьдесят вариантов выражения лица. Стоимость робота — $200.
3. Робот-помощник «Aeolus»
Представьте себе робота на колесах, который по команде приносит из холодильника бутылку газировки. Для тех, кто ждет идеального помощника по дому — мечта сбылась. По информации сайт, робот-помощник «Aeolus» призван облегчить вашу жизнь, выполняя работу по дому, пока вы спите. Робот использует искусственный интеллект и технологию машинного обучения для распознавания предметов с разных углов и расстояний.
На месте глаз у «Aeolus» установлены специальные широкоугольные камеры с трехмерными датчиками. Таким образом, робот может пылесосить, мыть полы, вытирать пыль, мыть окна и многое другое. Он даже запоминает, в каких местах находятся вещи в доме, чтобы в случае необходимости вернуть их на место. Несмотря на то, что это все еще прототип, создатели заявили, что разработка будет доступна для покупки ужу в этом году, а цена не нее будет меньшей, чем заграничный отпуск для семьи, сколько бы это не значило.
4. «Умный» домашний робот «Aido»
«Aido» — уникальный интерактивный домашний робот, который может с легкостью маневрировать в доме. Создатели «Aido» заложили в робота набор функций, основываясь на исследовании часто запрашиваемых опций у электронных домашних помощников.
Этот семейный робот был разработан, чтобы сделать его взаимодействие с людьми как можно более естественным и интуитивным. Внутри «Aido» находится сабвуфер и колонки системы домашнего кинотеатра.
Интерактивное взаимодействие с людьми осуществляется инновационной системой распознавания речи. Робот может помогать с работой по дому, играть с детьми, обеспечивать безопасность дома и даже выполнять запрограммированные задачи. «Aido» компании Ingen Dynamic Inc. доступен по предзаказу за $499.
5. Семейный друг «Buddy»
«Buddy» — это робот с открытым исходным кодом, работающий на программном обеспечении Unity 3D и Android. Этот «социальный» робот-помощник от компании Blue Frog Robotics станет отличным компаньоном для всей семьи. Он может встречать вас, напомнить вам о событиях и даже охранять ваш дом с сияющей улыбкой на лице.
Маршрут патрулирования робота довольно «продвинутый». «Buddy» способен наблюдать как за одним местом, так и передвигаться между указанными точками. Как и другие модели, о которых мы упоминали ранее, «Buddy» может похвастаться продвинутым интеллектом.
Человек на выполнение таких однообразных и монотонных домашних работ, как уборка помещения или работы в саду, тратит значительную часть своего времени. Некоторые получают от подобного рода занятий истинное удовольствие, но для большинства приведение жилого пространства в надлежащий порядок является задачей рутинной, скучной и не слишком приятной. Начиная с 50—60-х годов прошлого столетия, когда только начало зарождаться понятие «роботизированный помощник», общество уже вовсю мечтало переложить часть своих повседневных обязанностей на бездушное механизированное устройство, не подверженное усталости, стрессам и готовое выполнить самую грязную работу. Речь идёт о роботах-слугах и автоматизированных помощниках, прототипы которых появились более чем полстолетия назад.

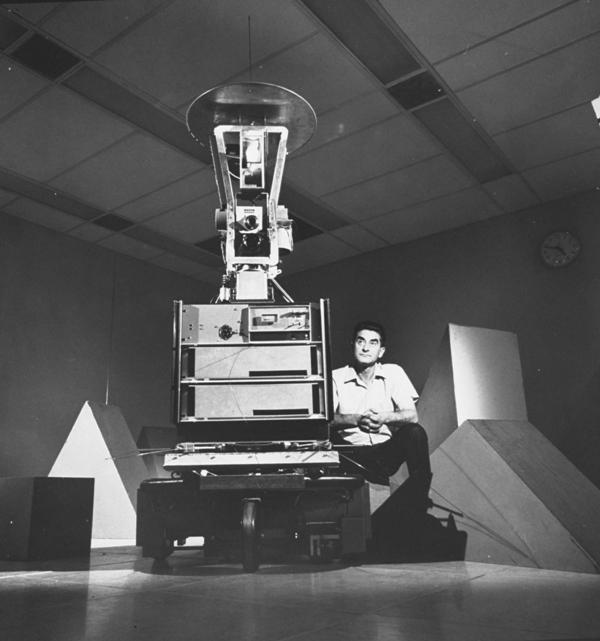
Первый мобильный робот, анализирующий команды и свои действия
В 1966 году инженеры Центра Искусственного интеллекта при Стэнфордском университете взялись за создание робота, наделённого способностью самостоятельного ориентирования и передвижения в помещении без создания аварийных ситуаций. Проект предусматривал разработку конструкции на колёсном шасси с возможностью самообучения, а также целостного анализа поставленных перед машиной задач.

Устройство, получившее название Shakey, оснащалось набором датчиков и телекамерой для определения текущего местоположения и габаритов окружающих робота предметов. В 1972 году проект Shakey подошёл к завершению, воплотив в единой конструкции передовые достижения инженеров того времени. Мобильное устройство демонстрировало свои возможности в специальном тестовом павильоне из нескольких комнат, связанных между собой коридорами. Робот выполнял команды учёных, толкая различные предметы, закрывая и открывая двери, взаимодействуя с выключателями и различными объектами.
Перспективность заложенного в Shakey алгоритма подтолкнула учёных к дальнейшим работам в данном направлении и созданию ряда более совершенных автоматизированных механизмов, а также внедрению способности у подобного рода устройства идентифицировать и реагировать на голосовые команды.
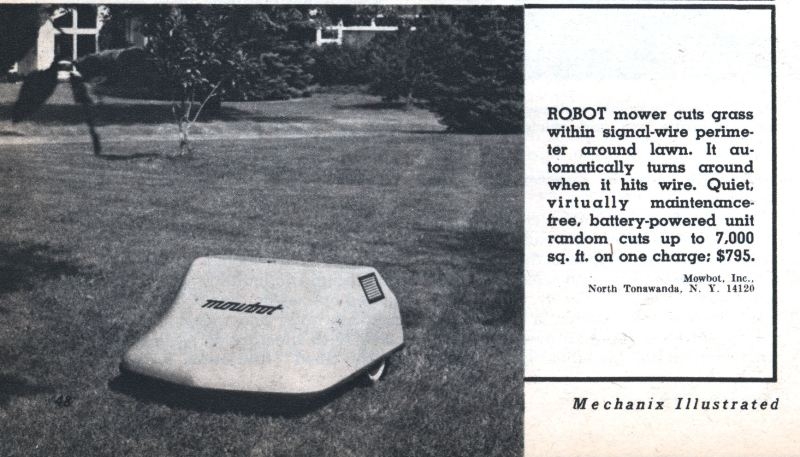
Беспроводная и автономная стрижка лужайки
В 1969 году фирма MowBot Inc. представила миру роботизированную газонокосилку, функционирующую от встроенного аккумулятора без необходимости подключения к домашней сети. Заряда батареи хватало для стрижки травы на участке в 650 м 2 . И хотя аппарат стоимостью $795 был весьма далёк от современных программируемых «умных» устройств, которыми можно управлять даже со смартфона, идея избавиться от проводов оказалась весьма интересной и получила логическое развитие.
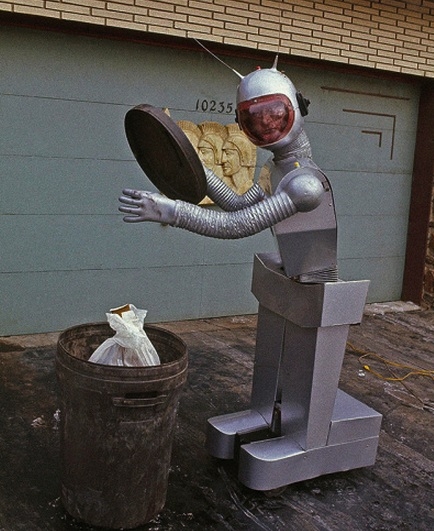
Полноразмерный робот Arok: и с собакой погуляет, и мусор вынесет
Какой «дом будущего» может обойтись без роботизированной прислуги? Аналогичная мысль посетила и изобретателя Бена Скора (Ben Skora), который представил своё видение футуристического, учитывая 70-е года прошлого столетия, жилища с дистанционно управляемыми светильниками и прочими техническими новшествами. Не обошлось и без «умного» обслуживающего персонала, место которого занял двухметровый робот Arok с откровенно жутковатым лицом.
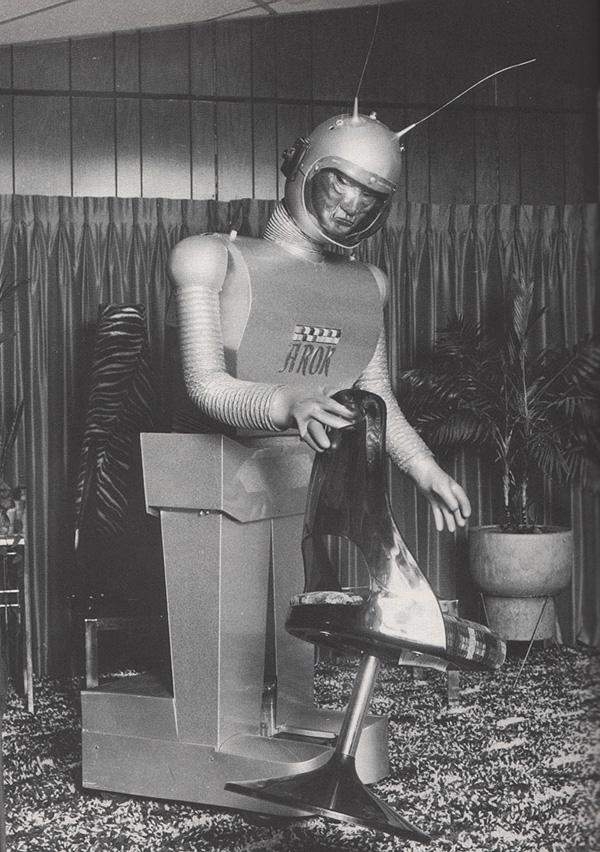
В задачи механизированного гиганта входили вынос мусора, подача напитков и даже выгул вашего четвероногого любимца. Конечно, наличие оператора для манипулирования устройством было обязательным условием. Так что штат прислуги в «доме будущего» предусматривал дополнительную вакансию для контроля за роботом-помощником.
Популярный в Японии игровой робот Omnibot: предыстория
Читатели 3DNews хорошо знакомы с устройством под названием Omnibot . А вот о его прародителе, ставшем одним из самых компактных роботов своего времени — Omnibot 2000, — известно гораздо меньше. Выпущен необычный аппарат был в 1984 году, а представлял он, как и сегодня, сверхтехнологичную и передовую автономную модель на рынке самых необычных игрушек того времени.
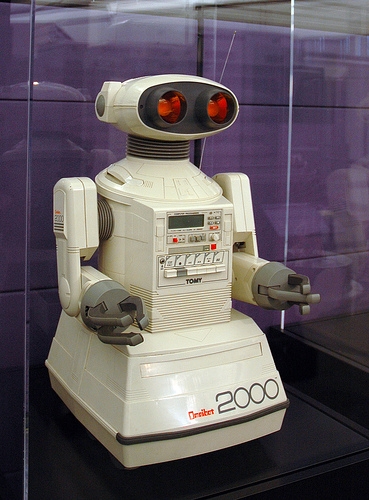
Omnibot 2000 имел возможность дистанционного управления, однако разработчики предусмотрели и полностью самостоятельное перемещение своего детища по заранее установленному маршруту. Все необходимые для запрограммированного движения данные записывались на кассету, а робота можно было использовать в качестве официанта для доставки еды и напитков на большой вечеринке.

SynPet Newton: одомашненный вариант «звёздного» R2D2
Если вам пришёлся по душе милый и издающий необычные звуки робот R2D2 из саги Джорджа Лукаса (George Lucas) «Звёздные войны», то вам будет интересно узнать, что в промежуток с конца 80-х по начало 90-х годов в продаже находился его коммерческий аналог — SynPet Newton. Конечно, данный робот высотой примерно 86 см нельзя назвать точной копией легендарного R2D2, однако сходство в дизайне, как говорится, «налицо».
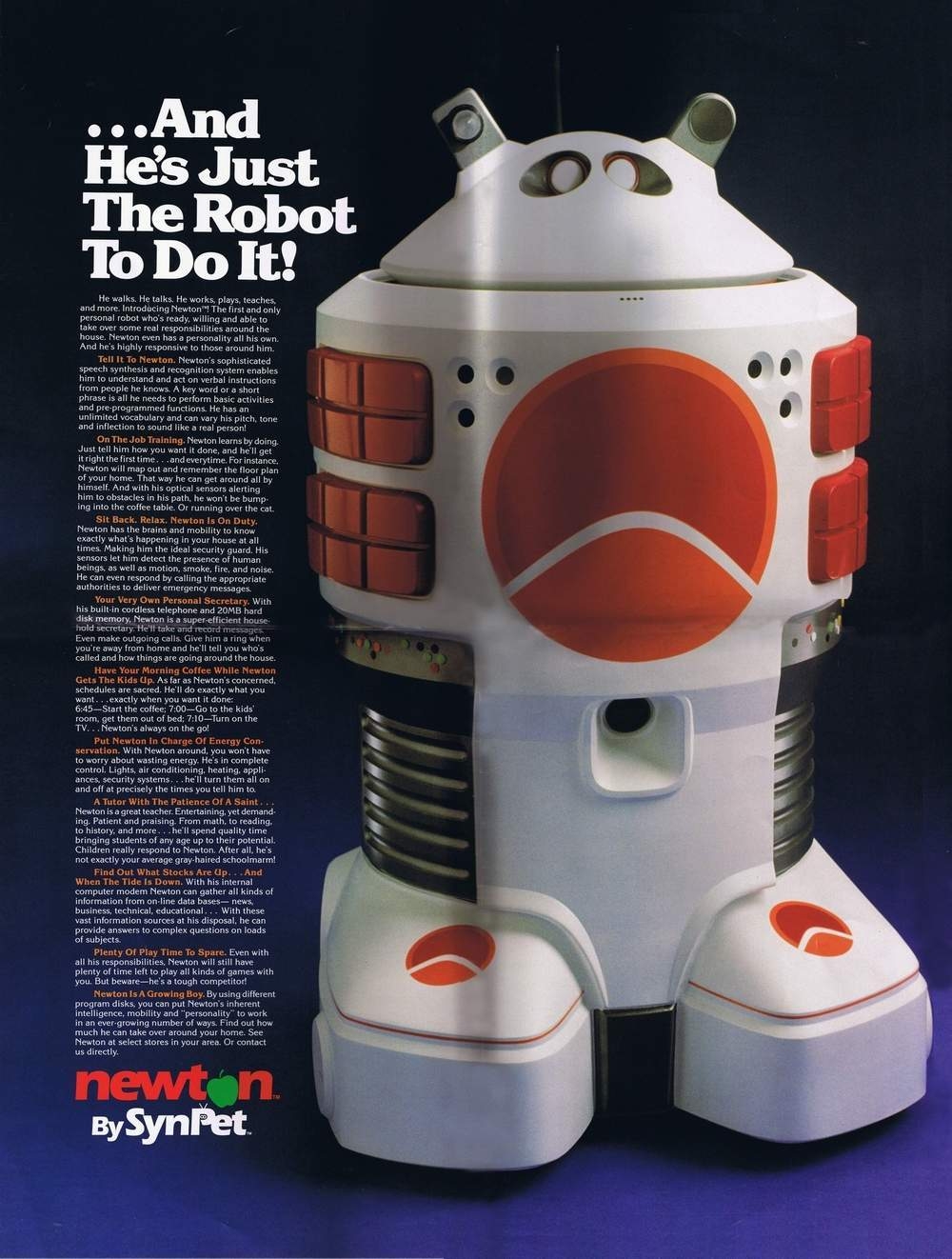
SynPet Newton мог свободно перемещаться по квартире, мог похвастаться голосовым управлением и помогал справиться с домашними делами. За его работоспособность отвечал 16-битный микропроцессорный чип, а также широкий набор датчиков для полностью автономного передвижения в соответствии с выбранным режимом. При этом SynPet Newton мог общаться с жильцами, используя специальный синтезатор голоса, а также обеспечивать связь своего владельца с внешним миром при помощи встроенного беспроводного телефона и модема.
Правда, SynPet Newton могли себе позволить лишь самые обеспеченные американцы, ведь цена на «умную машину» составляла баснословные $8000.

Венец эволюции человекоподобных роботов от инженеров Honda
Пожалуй, самым известным на сегодня роботом-гуманоидом является устройство компании Honda, проходящее под названием ASIMO . Около десяти лет понадобилось инженерам японской компании, чтобы в конечном итоге довести параметры прототипа до текущего предела в виде сочетания высокой скорости перемещения, необычайной ловкости и продвинутого взаимодействия с людьми.
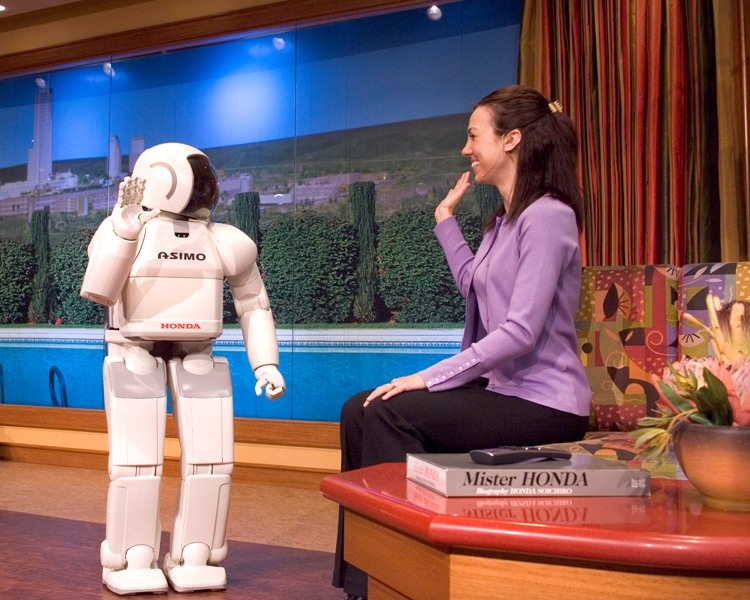
ASIMO способен приветливо встречать гостей рукопожатием и подносить напитки не хуже, чем это бы делал настоящий официант.

iRobot Roomba: ответственный за чистоту в вашем доме
Роботы-пылесосы не успели стать распространённым гаджетом в домах простых пользователей из-за их высокой стоимости. Однако некоторые модели всё же имели коммерческий успех и прижились в квартирах своих владельцев, как это сделал один из первых домашних механизированных уборщиков — iRobot Roomba. Основной задачей устройства, которое появилось на рынке 12 лет назад, является качественная, а главное — полностью автономная чистка самых сложных типов напольного покрытия.

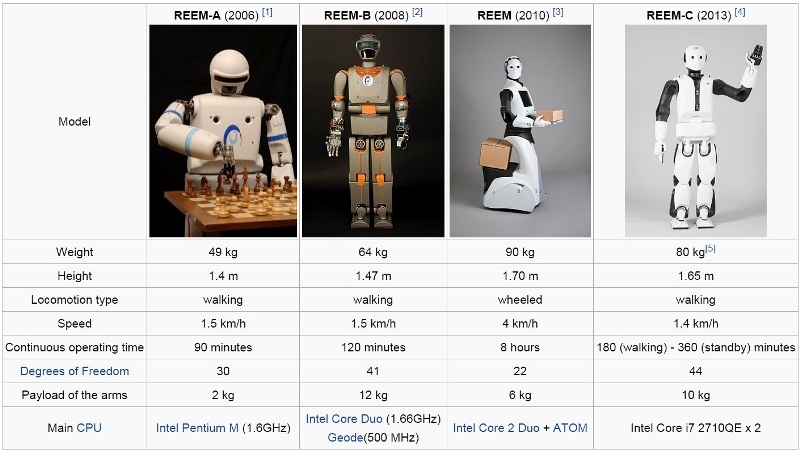
Робот-гуманоид Reem: и грузчик, и информационный центр
Вам часто доводилось передвигаться по зданию вокзала или аэропорта с громоздким и тяжёлым багажом, а заодно пытаться разузнать необходимые для посадки на рейс сведения? Похоже, что данная проблема в Испании, где обосновалась фирма PAL Robotics, сподвигла команду из четырёх инженеров заняться разработкой робота-носильщика Reem-A.

Прежде разработчики уже имели опыт конструирования человекоподобных машин, берущих на себя роль обслуживающего персонала. Это позволило в 2012 году представить коммерческий образец Reem с функцией телеуправления, который не только способен перевозить на себе грузы, но и выступить в качестве информационно-справочного киоска.


Впоследствии устройство было модернизировано до версии REEM-C — ему вернули обе ноги, как это было предусмотрено в модификациях с индексом «А» и «B».
Ваш личный роботизированный бармен за $2700
Если отбросить процедуры, которые требуют перемещения в пространстве, подъём грузов и сложные механические манипуляции, то для чего могло бы пригодиться небольшое стационарное роботизированное устройство? Конечно для приготовления разнообразных коктейлей. Робот Monsieur стал примером искусного автоматизированного бармена, который не только приготовит вам любимый напиток, но и радостно поприветствует своего владельца по возвращению домой. Для этого в конструкторами была предусмотрена функция определения вашего пребывания в квартире с помощью приложения для мобильного устройства, обеспечивающего синхронизацию с Monsieur и управление аппаратом по Bluetooth и Wi-Fi.

Система способна не только выполнять заказы на коктейли дистанционно со смартфона или планшета, но и предлагать вам двойные порции напитков в случае, если вы задержались на работе и у вас был очень напряжённый день.
Главной же особенностью 23-кг ящика с сенсорным дисплеем стало количество коктейлей, которые он способен приготовить гостям на вашей вечеринке. Аппарат включает в себя 12 тематических вариаций — «безалкогольная вечеринка», «спортивный бар», «ирландский паб» и другие, в каждой из которых насчитывается порядка 25 рецептов различных напитков.
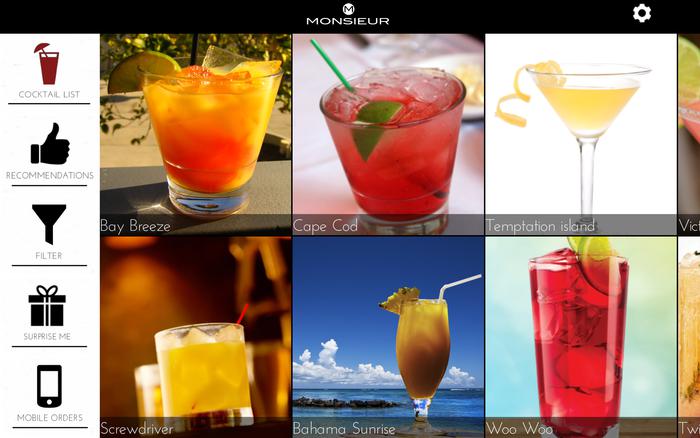
Реализация проекта роботизированного бармена стала возможной благодаря краудфандинговой платформе Kickstarter, на которой стартап Monsieur собрал пожертвований на общую сумму $140 тыс.

Стартап JIBO: если вам одиноко и не с кем поговорить
Робот JIBO, который понравился посетителям площадки Indiegogo, что принесло создателям устройства свыше $2 млн, станет персональным сочувствующим собеседником, вежливым, покорным и подбадривающим слушателем независимо от вашего текущего эмоционального состояния.

Так называемая социальная модель поведения, характерная для JIBO, в совокупности с продвинутой аппаратной и программной составляющей позволит устройству найти индивидуальный подход при общении с каждым членом семьи. Устройство способно самостоятельно идентифицировать собеседника, а также уловить его настроение, чтобы выбрать наиболее подходящий в сложившейся ситуации алгоритм поведения.
JIBO, обладая беспроводным доступом в Сеть, по голосовому запросу найдёт рецепты различных блюд на грядущий ужин, проинформирует о новом письме на вашей электронной почте, поможет с покупками, а также уместно пошутит, развлечёт весёлой историей и скрасит пасмурный вечер хорошей музыкальной композиции.


Обзавестись необычным роботизированным другом сможет практически любой желающий, ведь цена на JIBO составляет всего $500.
Роботы на страже порядка
Отличным способом применения роботизированных устройств стало выполнение ими охранных функций. И ведь действительно: тепловизоры, датчики движения, лазерный дальномер, всевозможные камеры и «умные» системы в теории способны значительно раньше обнаружить нарушителя, заподозрить неладное и сообщить об угрозе или уже состоявшемся проникновении на охраняемую территорию, чем это сделал бы даже опытный человек.
И если детище специалистов из Knightscope предназначено для пассивного наблюдения и отправки сигнала тревоги на диспетчерский пульт, то, к примеру, робот-охранник PatrolBot Mark II готов самостоятельно противодействовать нарушителю. Для этого на его колёсной платформе установлен клаксон на 100 дБ и водный пистолет, с помощью которого оператор может подмочить в прямом смысле этого слова репутацию и одежду нарушителя.
